6 — критическое демпфирование; / — изменение уставки; коэффициент демпфирования равен отношению амплитуд последовательных циклов перерегулирования; критическое демпфирование — демпфирование, достаточное для предотвращения любого перерегулирования
Пропорциональное управление. Наиболее понятная концепция управления состоит в том, что компенсация ошибки рассогласования производится без задержки пропорционально значению этой ошибки. Такой тип управления называется пропорциональным и описывается следующим уравнением:
Ср (t) = Кре (t), (13.1)
где Кр — коэффициент пропорциональности; е (t) — ошибка рассогласования (в функции времени); Ср (t)—значение коррекции, пропорциональное ошибке (в функции времени).
Если коэффициент пропорциональности Кр является большим, то и быстродействие системы является высоким. В этом случае говорят, что система обладает высоким «коэффициентом усиления». Безусловно, при слишком большом коэффициенте усиления система может стать неустойчивой.
На рис. 13.8 приведена графическая зависимость, иллюстрирующая поведение системы при пропорциональном управлении. После затухания переходного процесса фактическое значение регулируемого параметра системы не будет в точности соответствовать заданному значению. Здесь необходима постоянная компенсация, поскольку система пропорционального управления не может полностью исключить ошибку рассогласования. Для осуществления компенсации необходимо измерить ошибку рассогласования, причем значение ошибки должно быть достаточным для распознавания последней датчиком рабочего органа.
Интегральное управление. Интегральное управление, называемое иногда управлением с компенсацией «запаздывания» или управлением с «коррекцией» ошибки, предусматривает накопление данных об ошибке рассогласования и формирование коррекции, пропорциональной полной накопленной ошибке. Интегральное управление описывается уравнением
где Ki — коэффициент интегрального управления; e(t) — ошибка рассогласования (в функции времени);
Сi—интегральная коррекция (в функции времени).
Нетрудно видеть, что постоянное рассогласование, показанное на рис. 13.8, может быть скомпенсировано интегральным управлением. Хотя рассогласование невелико, поскольку оно накапливается в течение некоторого времени, оно может стать существенным, и в конце концов, ответом будет управляющий сигнал, сформированный устройством интегрального управления. Таким образом, весьма целесообразно использовать пропорционально-интегральное управление, причем пропорциональное — для формирования управляющего сигнала в функции ошибки, а интегральное—для компенсации ошибки рассогласования.
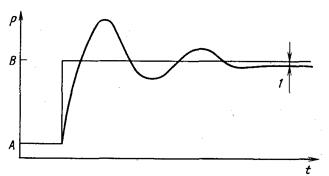
Рис. 13.8
Изменение параметров процесса Р (t) при пропорциональном управлении:
1 — статическая ошибка рассогласования
Дифференциальное управление. Дифференциальное управление является наиболее сложной концепцией, иногда называется управлением в функции «скорости». Дифференциальное управление применяется не столь широко и в основном в сочетании с другими типами управления. Дифференциальное управление описывается уравнением
где Kd —коэффициент дифференциального управления; e (t) — ошибка рассогласования (в функции времени); Сd (t) —дифференциальная коррекция (в функции времени).
При дифференциальном управлении не учитываются ни текущая, ни интегральная ошибки. В этом случае управление производится по скорости, являющейся производной ошибки рассогласования по пути. Таким образом, использование дифференциального управления позволяет до некоторой степени прогнозировать протекание, технологического процесса. Действие дифференциального регулятора в начале компенсации ошибки рассогласования направлено противоположно действию пропорционального регулятора, поскольку пропорциональный регулятор учитывает направление вектора ошибки (к перерегулированию). Дифференциальное управление может использоваться для демпфирования перерегулирования. Дифференциальное управление, сбалансированное надлежащим образом, может обеспечить эффективное улучшение уровня пропорционального и интегрального управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.