С другой стороны, квадрат текущего значения амплитуды сигнала
пропорционален мощности этого сигнала. Поэтому второе слагаемое определяет
величину работы, затраченной за период времени ![]() на
формирование обучающего воздействия
на
формирование обучающего воздействия ![]() на модель объекта
управления.
на модель объекта
управления.
Таким образом, ФОР (2.6) представляет собой аддитивную свертку двух показателей качества обучения модели объекта управления, определяющих погрешность обучения (первое слагаемое) и затраты энергии на обучение (второе слагаемое).
Весовой вклад второго слагаемого в обобщенный показатель качества
обучения устанавливает параметр ![]() .
.
Кроме того, ФОР (2.6) определяет величину суммарной работы,
затраченной на формирование сигнала рассогласования ![]() и обучающего
воздействия
и обучающего
воздействия ![]() за период времени обучения
за период времени обучения ![]() . Поэтому этот показатель качества
управления и получил свое название: "функционал обобщенной работы".
. Поэтому этот показатель качества
управления и получил свое название: "функционал обобщенной работы".
Таким образом, задача обучения модели объекта управления эквивалентна следующей задаче условной оптимизации:
определить оценки переменных состояния и обучающее
воздействие ![]() , обращающие в минимум квадратичного ФОР
(2.6) при выполнении ограничений, создаваемых уравнением состояния (2.3).
, обращающие в минимум квадратичного ФОР
(2.6) при выполнении ограничений, создаваемых уравнением состояния (2.3).
3 АЛГОРИТМ ОБУЧЕНИЯ МОДЕЛИ ПРОЦЕССА ФОРМИРОВАНИЯ АКТИВНОЙ МОЩНОСТИ
3.1 Модель системы в пространстве состояний
В данной работе использовалась модель объекта в пространстве состояний, особенности и преимущества которой рассматривались во второй главе.
В данной работе разработана модель процесса формирования активной мощности гидроагрегата, которая изображена на рисунке 10. Переменные состояния поступают в модель с измерительных устройств. Входными являются в нашем случае открытие направляющего аппарата (Zна), угол разворота лопастей рабочего колеса (ψрк), напор (H), биение опор вала ротора (b) и измеренные значения вибрации (V), выходными – активная мощность (Na).
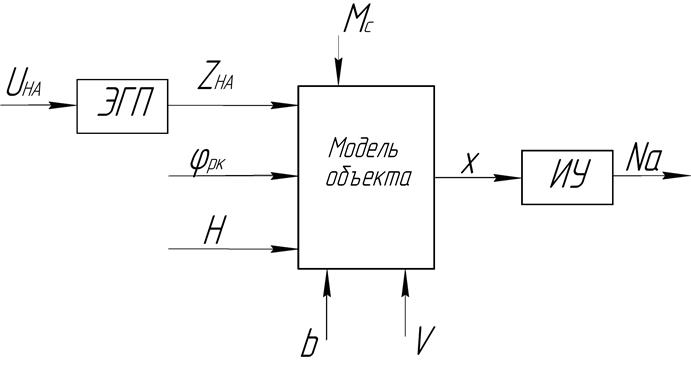
Рисунок 10 - Модель процесса формирования активной мощности
Далее составим дифференциальное уравнение I-го порядка, описывающее работу моделируемого объекта с помощью переменных состояния. Алгоритм составления модели в пространстве состояний описан подробно в главе 2.
 ,
,
где τ – постоянная времени, а w – возмущающее воздействие. При предварительном обучении модели возмущающим воздействием будем пренебрегать.
Для моделирования на ЭВМ перейдем от дифференциального уравнения к его разностному аналогу. Так как быстродействие современных средств вычислительной техники велико, то погрешность такого перехода будет мала.
Для этого проведем квантование времени:
![]() ,
,
![]() ,
,
![]() ,
,
где ![]() - время квантования, k – количество
измерений.
- время квантования, k – количество
измерений.
Время квантования Δt равно единице в нашем случае вследствие того, что датчики опрашиваются с интервалом в 1 секунду.
Заменим производную разностным выражением:
 .
.
Тогда (3.1) можем записать как:
 .
.
Таким образом, мы получили модель объекта управления в пространстве состояний, где
|
|
вектор неизвестных параметров, которые следует определить. Для этой задачи можно применить метод наименьших квадратов.
Анализ показывает, что в гидроагрегате происходят нелинейные процессы.
Мощность гидроагрегата пропорциональна мощности, развиваемой рабочим колесом, которая потом преобразуется в генераторе в электрическую. Развиваемая мощность рабочего колеса определяется из следующего уравнения [12]:
![]() , (3.4)
, (3.4)
где М –
момент движущих сил, ![]() – скорость рабочего колеса.
– скорость рабочего колеса.
Момент описывается уравнением закона момента количества движения, который в данном случае описывается уравнением (3.5):
![]() , (3.5)
, (3.5)
где ![]() –
плотность воды, v1 и v2 – скорость во входном и выходном сечении.
–
плотность воды, v1 и v2 – скорость во входном и выходном сечении.
На рисунке 12 построен треугольник скоростей для входа и выхода воды в гидроагрегат.
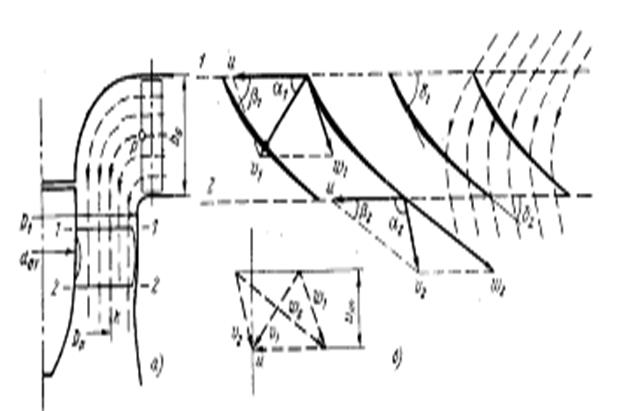
Рисунок 12 – Поток в осевой турбине
Как видно из построений, скорость зависит от напора и угла, под которым идет поток:
 . (3.6)
. (3.6)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.