Существующие системы управления максимального быстродействия, оснащенные ПИД-регуляторами с постоянными параметрами, имеют, как правило, статическую погрешность и создают существенное перерегулирование переменных состояния многомерных объектов управления (ОУ). Это связано с тем, что синтез алгоритмов управления для этих систем выполнен на базе линейных моделей ОУ и без учета реальных законов изменения возмущающих воздействий.
В установившихся режимах работы отклонение активной мощности гидроагрегатов от требуемых значений (статическая погрешность регулирования) составляет 2-3 МВт, а динамическая погрешность достигает 15 МВт (рис. 3).
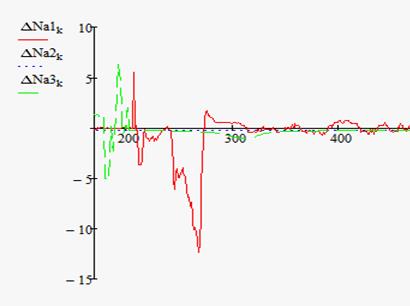
Рисунок 3 - Погрешность регулирования мощности гидроагрегата № 8 при 3-х пусках, МВт
Колебательный характер изменения положений лопаток направляющего аппарата и значений мощности турбины вызывает колебания давления в спиральной камере и отсасывающей трубе, что приводит к возникновению вибраций и кавитации, а значит и к сокращению межремонтного периода.
1.2 Управляющие устройства САУ ГА
Штатная САУ содержит ПИД-реулятор частоты вращения ротора и ПИ-регулятор активной мощности гидроагрегата с постоянными параметрами настройки регуляторов. Управление осуществляют поворотом лопаток направляющего аппарата (НА) и лопастей рабочего колеса (РК) турбины с применением электронного комбинатора.
Электронный комбинатор формирует требуемое значение угла установки лопастей РК по результатам измерений напора воды и угла поворота лопаток НА с помощью статической характеристики (комбинаторной зависимости), полученной экспериментальными исследованиями моделей рабочих колес поворотно-лопастных гидротурбин.
Настройка параметров регуляторов осуществляют с использованием линейных моделей процессов, происходящих в объекте управления (ОУ) и заданных передаточными функциями с постоянными параметрами. Эти модели получены линеаризацией исходных нелинейных уравнений анализируемых процессов в окрестности установившихся режимов работы ОУ по каждому каналу управления.
Задание мощности в существующей системе формирует задатчик мощности, показанный на рисунке 4, предназначенный для изменения «Выше – ниже» задания мощности (при наличии сигнала активной мощности генератора) или задания открытия (при отсутствии сигнала активной мощности генератора), а также для установки задания в соответствии с сигналом группового управления Pjc.
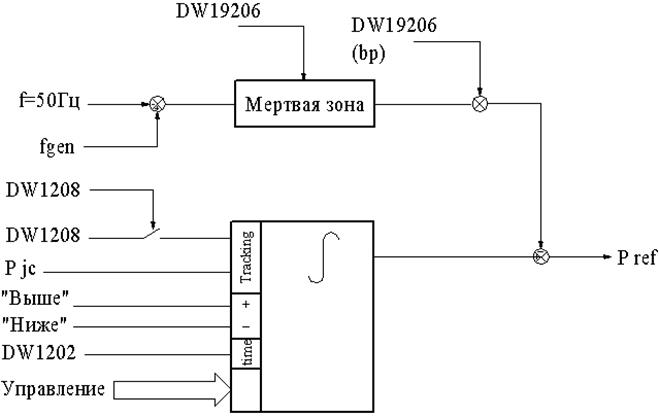
Рисунок 4 - Задатчик мощности
Установка задания осуществляется с выбранной скоростью изменения, определяемой параметром DW1202.
В состав функций задатчика входят формирование статизма частота/мощность и набор технологического минимума нагрузки (ВЦ1208 = 1). При работе в режиме «мощность» и выходе частоты за пределы величины «мертвой зоны» (DW19206) вводится регулирование по частоте со статизмом (DW19202) и увеличенной постоянной времени интегрирования (DW19205).
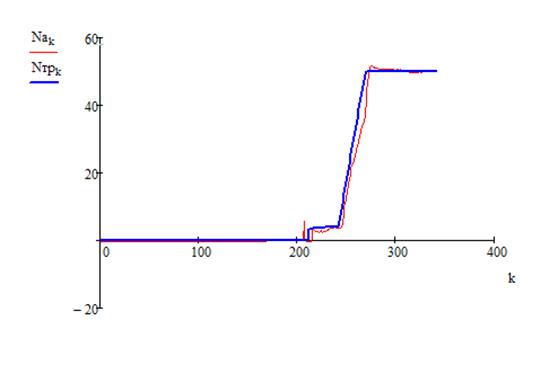
Рисунок 5 - Задание регулятору на изменение активной мощности. Nтрk – задание регулятору; Nak – реализованная активная мощность (гидроагрегат № 8 с контроллером EMERSON, пуск 23.06.2007 г.)
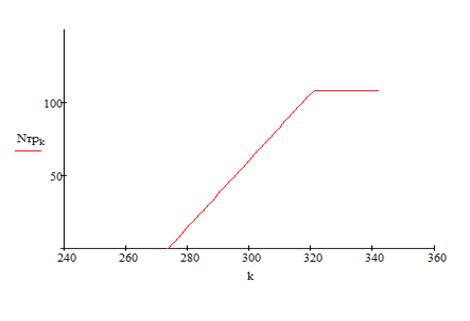
Рисунок 6 - Задание регулятору на изменение активной мощности (гидроагрегат № 4, пуск 08.12.2006 г.)
Такие функции содержат разрывы непрерывности производных (скоростей и ускорений), а система управления по этим же зависимостям стремится формировать и управляемые переменные, создавая скачкообразные силы инерции. В результате в переходных режимах работы гидроагрегатов возникают гидроудары.
Поддержание мощности гидроагрегата равной ее заданному значению ведется формирователем, показанным на рисунке 7. Поддержание мощности ведется вне зависимости от колебаний напора или его динамического изменения в процессе регулирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.