2.2.1.4 Условное изображение кинематических цепей всех механизмов станка называют кинематической схемой данного станка.
Кинематические схемы могут быть пространственными и плоскими; первые более наглядны, вторые – проще в исполнении и потому встречаются чаще. Повышение наглядности плоских схем может быть достигнуто при продуманном их исполнении.
Кинематическую схему следует вписывать в габариты или контуры важнейшей проекции станка, сохраняя, по возможности, относительное расположение его отдельных механизмов.
Главная цель кинематической схемы – создание ясного представления о кинематике станка. Этой цели подчинено всё остальное, поэтому при вычерчивании плоской схемы допускаются такие условности, которые, способствуя уяснению кинематики станка, не вполне согласуются с реальной конструкцией его. К примеру, вал, изображаемый обычно прямой линией, может быть показан изогнутым. Допускается полуконструктивное изображение отдельных элементов и частей приводов и узлов станка. Такие подходы проявлены при выполнении кинематических схем данного пособия.
Кинематические схемы станков, несмотря на ряд упрощений и условностей при изображении их, дают простое и наглядное представление не только о кинематике станков, но в некоторой степени и об их конструкции. При соблюдении определённых правил и при внимательном отношении к составлению кинематической схемы она может быть понятна почти без всяких дополнительных пояснений, если известен принцип работы станка.
В станочных приводах со ступенчатым регулированием часто применяются зубчатые механизмы (далее: механизмы, группы передач или групповые передачи) на 2, 3, 4 скорости с передвижными (подвижными) блоками шестерён и с муфтами.
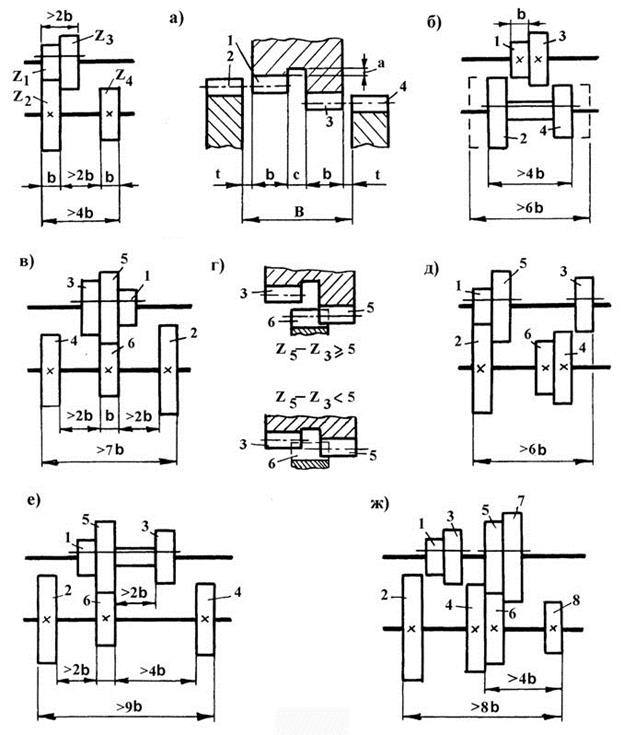
2.2.2.1 Некоторые варианты групповых передач с передвижными блоками шестерён показаны на рис. 2.2:
|
Рис. 2.2. Группы передач с передвижными блоками шестерён: а, б – варианты групп на 2 скорости; в – основное решение группы на 3 скорости при Z5-Z3≥5 (г); д, е – варианты групп на три скорости при Z5-Z3<5 (г) с разделённым и широким блоками соответственно; ж – основной вариант группы на 4 скорости |
- механизм на 2 скорости c узким передвижным блоком шестерён (см. рис. 2.2,а) обеспечивает следующие передаточные отношения:
 ;
;  . Их
можно представить единой записью:
. Их
можно представить единой записью:  .
.
Примечание. Здесь и далее шестерни в групповых передачах обозначаются буквами с цифровым индексом, при этом наименьшее колесо на ведущем валу обозначается Z1, связанное с ним – Z2, следующее по величине на ведущем валу – Z3, связанное ним – Z4 и т.д.
В группе передач шестерни Z1 и Z3 составляют передвижной двухвенцовый зубчатый блок или блок-двойку.
Конструктивная длина механизма – больше 4b, где b – ширина зубчатого колеса.
Расстояние между неподвижными шестернями В>2b, а именно B = 2b + 2t + с,
где t – зазор между сопрягаемыми зубчатыми венцами при нейтральном положении блока, принимаемый обычно не менее 1-3 мм;
с – ширина технологической канавки (для выхода зуборезного долбяка). Ширина канавки и её глубина а принимаются в зависимости от модуля зацепления:
|
Модуль, мм (£) |
2 |
4 |
6 |
8 |
|
с, для прямозубых колес, мм (³) |
5 |
6 |
7 |
8 |
|
а, мм (³) |
0,5 |
1,5 |
2 |
2,5 |
- механизм на 2 скорости c широким передвижным блоком шестерён (см. рис. 2.2,б) имеет большую длину, чем предыдущий механизм (>6b), но действие усилий на валы при включении разных передач сосредоточено почти в одном месте;
- группы передач на 3 скорости (см. рис. 2.2,в,д,е):
 ;
;  ;
;  или
или  .
.
Более распространенный вариант – механизм c узким передвижным блоком шестерён или блоком-тройкой Z3-Z5-Z1 (см. рис. 2.2,в). Он применяется, когда разница в числах зубьев соседних венцов Z5-Z3³5. Если это условие не выдерживается, то при перемещении блока для соединения колёс 1 и 2 (Z1 и Z2) произойдёт сцепление колеса 6 одновременно с колёсами 3 и 5 (см. рис. 2.2,г).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.