Числа зубьев некоррегированных колёс, исходя из условия отсутствия подрезания при их изготовлении и из конструктивных соображений, не следует принимать менее
Zmin=(17-)20-22.
Числа зубьев в группе передач, содержащей шестерни одинакового модуля, можно определить различными способами, и в том числе:
- способом наименьшего общего кратного;
- упрощенным способом;
- с помощью логарифмической линейки;
- по специальным таблицам.
Рассмотрим суть упрощенного способа расчёта чисел зубьев.
Пусть в группе передач ![]() при этом
при этом ![]() и
и
![]() Т.к.
Т.к. ![]() а
а ![]()
то ![]() или
или
![]() Приняв
Приняв  получим:
получим:
![]() и
и ![]() (3.1)
(3.1)
При расчёте чисел зубьев
принимают Z1=Zmin, определяют  и
SZ=Z1+Z2;
обычно SZ£120. Затем определяют все остальные
числа зубьев по формулам (3.1).
и
SZ=Z1+Z2;
обычно SZ£120. Затем определяют все остальные
числа зубьев по формулам (3.1).
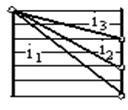
Пример. Определить числа зубьев передач группы на три скорости, представленной на фрагменте ДЧВ (рис. У.13,а), φ=1,26.
 .
.
Принимаем Z1=20, тогда Z2=20:(1/4)=80 и SZ=20+80=100;
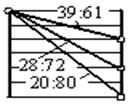
Подсчитанные числа зубьев проставляем на ДЧВ рис. У.13.б).
|
а) б)
Рис. У.13. Фрагменты ДЧВ: а – до расчёта чисел зубьев; б – с проставленными числами зубьев |
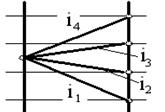
Рис. У.14а. Фрагмент ДЧВ для сменных обратимых шестерён |
3.9.4 Особенности расчёта приводов со сменными обратимыми зубчатыми колёсами
При использовании в приводе сменных колёс (см. п/п. 2.2.4.1 и рис. У.5) можно уменьшить их количество, сделав обратимыми, т.е. обеспечив с помощью, например, двух колёс Z1¹Z2 (а¹б) два передаточных отношения
![]() с
помощью 4 колёс – 4 и т.д.
с
помощью 4 колёс – 4 и т.д.
На ДЧВ группа из сменных обратимых колёс имеет симметричные лучи. Фрагмент ДЧВ для группы на четыре варианта из обратимых сменных шестерён показан на рис. У.14а. Передаточные отношения группы будут следующими:

В данном случае 2 пары сменных обратимых колёс являются основной группой.
Суммы зубьев сменных колёс для станков принимают обычно равными 72, 90 или 120.
3.9.5 Особенности расчёта приводов с многоскоростными электродвигателями
Применение в приводе многоскоростного электродвигателя позволяет несколько упростить механическую часть привода и обеспечить возможность переключения скоростей на ходу.
При расчёте коробок скоростей такой двигатель играет роль первой в кинематическом плане группы передач, т.е. рассматривается как некая фиктивная "электрогруппа" со знаменателем jэ=jр, где р – произведение чисел передач групп, предшествующих "электрогруппе" по порядку переключения для обеспечения последовательно возрастающего геометрического ряда частот вращения шпинделя.
Правильный геометрический ряд частот вращения шпинделя может быть получен при применении электродвигателей с jэ=2. К таким относятся асинхронные электродвигатели, у которых синхронные частоты вращения равны 750/1500; 1500/3000; 750/1500/3000.
С учётом отмеченного ![]() , откуда
, откуда ![]() .
.
Решение последнего выражения для ряда значений φ дано ниже:
|
φ: |
1,06; |
1,09; |
1,12; |
1,18; |
1,26 (1,25); |
1,41 (1,4); |
2 |
|
p: |
12; |
8; |
6; |
4; |
3; |
2; |
1 |
Очевидно, "электрогруппа" при φ <2 должна быть множительной группой. К примеру, при φ=1,26 и 1,41 она должна быть I множительной с числом передач в основной 3 и 2 соответственно.
Пример. Построить структурную сетку
для привода ![]() с двухскоростным электродвигателем и φ
=1,41.
с двухскоростным электродвигателем и φ
=1,41.
При φ =1,41 "электрогруппе" должна предшествовать по порядку переключения основная группа на две скорости. Примем структурный вариант 8=2(2)·2(1)·2(4) и построим для этого случая структурную сетку (рис. У.14б), предварительно проверив, какое φmax допускается выбранной структурой и возможна ли её реализация при заданном φ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.