|
Итак Минимальное передаточное отношение привода будет равно:
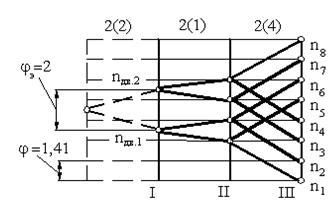
где nдв.min – минимальная частота вращения вала многоскоростного электродвигателя. Примечание. На сетке (см. рис. У.14б) пунктиром показана часть, относящаяся к группе 2(2), которой на самом деле нет, а есть лишь две частоты вращения вала электродвигателя nдв.1 и nдв.2. В связи с этим то, что показано пунктиром, обычно на структурных сетках и ДЧВ не изображается. |
Рис. У.14б. Построение структурной сетки для привода с многоскоростным электродвигателем |
3.9.6 Расширение диапазона регулирования приводов
Как известно (см. п/п. 3.9.1.6), диапазон регулирования приводов с нормальными множительными структурами при двух передачах в последней множительной группе (pk=2) не может превышать величины 64/φ, что для большинства случаев явно недостаточно.
Применение прогрессивных инструментальных материалов и покрытий обуславливает необходимость увеличения диапазона регулирования в универсальных станках.
Однако желание увеличить диапазон регулирования при сохранении нормальной равномерной структуры приводит к нарушению граничных условий по передаточным отношениям (см. п/п. 3.9.1.5) в последней множительной группе.
При необходимости увеличения диапазона регулирования без нарушения граничных условий в последней множительной группе можно применить ряд структур и в частности:
- приводы с переборами;
- структуры с перекрытием части ступеней скорости шпинделя;
- структуры с составным геометрическим рядом;
- приводы со сложенной структурой.
Наиболее эффективно применение таких структур при pk=2.
3.9.6.1 Приводы с переборами (ступенями возврата)
Для увеличения редукции и диапазона регулирования в качестве последней множительной группы часто используют перебор (см. рис. 2.3,г и 2.11,а,б).
Поскольку перебор обычно имеет две последовательные замедляющие передачи, то для него может быть imin=1/16, а т.к. imax=1, то диапазон регулирования перебора
![]()
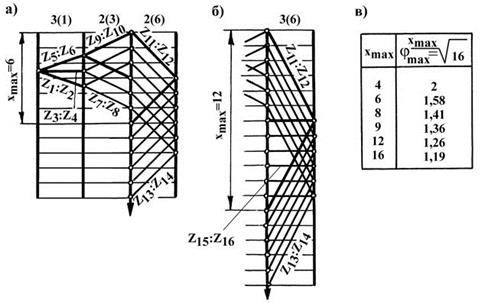
Решение последнего выражения для ряда значений xmax дано на рис. 3.3,в.
Поскольку перебор (ступень возврата) "возвращает" движение на ту же ось (на выходной вал, соосный с входным), то структурные сетки приводов с переборами строятся несимметрично.
Для приводов по рис. 2.11 структурные сетки представлены на рис. 3.3. Проанализируем их:
а) привод на 12 вариантов с одинарным перебором (см. рис. 2.11,а и 3.3,а)
![]()
|
Рис. 3.3. Варианты структурныхсеток приводов с переборами одинарным (а) и двойным (б) и таблица для определения φmax (в) |
Нормальная множительная структура на 12 вариантов обеспечивает значительно меньший диапазон:
б) привод на 18 вариантов с двойным перебором (см. рис. 2.11,б и 3.3,б)
В данном случае не обеспечивается
выигрыша по диапазону в сравнении с нормальной множительной структурой Этот пример показывает, что не всякое решение даёт выигрыш, и всегда следует делать сравнительный анализ возможных вариантов. |
При желании из каких либо соображений применить двойной перебор и допустимости меньшего числа вариантов структура, к примеру, 9=3(1)·3(3) лучше аналогичной нормальной.
Для нее ![]() в
то время как нормальная структура допускает
в
то время как нормальная структура допускает ![]() что по
величине обеспечиваемого диапазона значительно хуже.
что по
величине обеспечиваемого диапазона значительно хуже.
Определение чисел зубьев колёс, образующих перебор, следует производить с учётом того, что модули передач перебора могут быть различными вследствие сильной редукции, осуществляемой первой передачей, и обусловленного этим значительного увеличения крутящего момента, передаваемого второй парой колёс. Модули обеих передач можно принять и одинаковыми за счёт более высокого качества материалов второй пары колёс или увеличения длины их зубьев.
3.9.6.2 Приводы с перекрытием (повторением) части ступеней скорости шпинделя
Для обеспечения перекрытия части ступеней скорости характеристику последней множительной группы уменьшают на несколько единиц.
Рассмотрим получение структур с перекрытием при pk=2 на следующем примере.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.