У каждой машины есть свое предельное значение КПД.
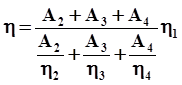
КПД при последовательном соединении машин.

![]()

![]()
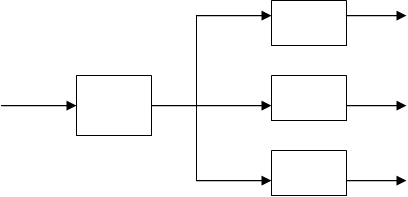
КПД при последовательно-параллельном соединении передач.
 А1`
А2
А1`
А2
А2
Аз A1 A1`` A3
А1 А3
A1` A4
А4
 (1)
(1)  (2)
(2) ![]() (3)
(3)
Выразим частные КПД приводов.
![]()

 (4)
(4)

Найдем из (4) А1`, A1``, A1``` и подставим в (3)
 (5)
(5)
Подставим (5) в (1)
Динамический анализ машин и механизмов.
Под динамическим анализом понимают определение положений, скоростей и ускорений звеньев машин.
Для поведения динамического анализа должны быть известны все силы действующие на машину, а также геометрические размеры и параметры всех звеньев.
Внешние силы могут задаваться аналитически, таблично или графически.
Для того чтобы провести динамический анализ машины составляют уравнения движения ее звеньев.
Уравнение движения машин и механизмов.
Уравнения движения машин и механизмов записываются в интегральной или дифференциальной форме.
Число уравнений динамики равно числу степеней свободы или числу обобщенных координат.
Уравнение движения машин в форме интеграла кинетической энергии.
Для любой машины, исходя из закона сохранения энергии, можно записать следующее уравнение:
|
k – число внешних сил, действующих на механизм;
Ak – работа k – ой силы за период времени Т;
Ti - кинетическая энергия i – го звена;
Toi - кинетическая энергия i – го звена в начале цикла;
n – число подвижных звеньев в механизме.
Уравнение (1) даже для простых механизмов получается очень сложным, поэтому на практике его не применяют, а применяют только для динамических моделей машин.
Построение динамической модели машины.
Так как уравнение (1) является довольно сложным, то его на практике для исследования всей машины не используют, при этом заменяют всю машину одним звеном. Это объясняется тем, что все звенья кинематической цепи машины являются абсолютно твердыми и поэтому, зная закон движения одного звена (звена приведения) можно найти закон движения всех остальных звеньев.
Динамическая модель машины может иметь такой вид:
 Jn Мn 1 –
кривошип, звено приведения,
Jn Мn 1 –
кривошип, звено приведения,
Мn - момент приведенных сил,
1 Jn - приведенный момент инерции звена. А
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.