Запишем уравнение движения механизма в форме интеграла кинетической энергии:
j
Jni *w1i 2 / 2 - J1n0 * w102 / 2 =ò Mn * dj (1) j0
![]() w1i =Ö 2 / Jni
*ò Mn
* dj
+ J1n 0 * w102 / Jni (2)
w1i =Ö 2 / Jni
*ò Mn
* dj
+ J1n 0 * w102 / Jni (2)
w = w (j, t) (3)
Обычно интеграл, стоящий в (2) не выражается в квадратурах, то есть выражение (2) решается численным методом. В этом случае интеграл находится:
Ai+1= Ai + (Mni + Mn i+1) * (ji +1 - ji)/ 2
Зная угловую скорость можно записать
w1i = dj1i / dt = w(j)
ò djI / w(j) = t + C1 (4)
Если подинтегральная функция решается непосредственно и в результате t = f(t) (5).
Если подинтегральная функция не решается в квадрантах, то решение аналогично, строя подинтегральную функцию. Перестраиваем (5) в виде j = f(t).
Все эти рассуждения относятся только к случаюw10 ¹ 0, то есть установ. режимом работы.
Если исследуем режим разбега машины, то необходимо записать и исследовать уравнение движения машины в дифференциальной форме:
(w21i / 2) * dJn / djI + Jn * d2j1 / dt2 = Mn (6)
Jn = const, Mn = const
Jn * dj1 / dt = Mn
w1= Mn * t / Jn+ C1 (7)
(7) можно представить
dj1 / dt = Mn * t / Jn + C1 (8)
Интегрируя (8) получим
j1 =Mn * t 2 / 2 * Jn + C1 * t + С2 (9)
С помощью (7) и (9) находится значение w10 ¹ 0 и j1, а затем принимая новые найденные значения за новые начальные условия интегрирования уравнения движения механизма с помощью 1-го метода.
Графо – аналитический метод решения уравнений движения механизмов. Метод Виттенбауэра.
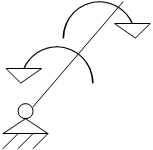 Мпс Мпс
– момент приведенных сил сопротивления;
Мпс Мпс
– момент приведенных сил сопротивления;
Mд Jn Мд – момент движущих сил сопротивления;
Мп – приведенный момент;
Решение исследуем на интервале 2p, в установившемся режиме:
t = 0; j1i = j10; w1i = w10;
при этом считаем, что Mд = const. Нахождение законов движения 1-го звена (звена приведения) просчитывают из диаграммы Виттенбауэра.
 T
T
Jn
Алгоритм решения.
1. Находим для искомого механизма Мпс= f(j), Jпс = f(j)
2. Строим график функции Мпс= f(j)
3. Определяем масштабные коэффициенты:
m = Мпс /отрМ m j = 2p / отрj
j
4. Определяем момент движущих сил Ад = Апс (за цикл): Mд * 2p = ò Мпс * dj
j0
Mд = ò Мпс * dj / 2p
5. Находим изменение кинетической энергии на каждом шаге интегрирования
êT = Ti - T0
êT = êA
êT = êAдв - êA пс = ò Мд * dj - ò Мпс * dj
Строим зависимость êT = f(j)
6. Строим повернутый на 90° график зависимости Jп = f(j)
7. Определяем масштабный коэффициент mj = Jпmax / отр J
8. Строим диаграмму Виттенбауэра, для чего строим зависимость êT = f(Jп)
9. Находим кинетическую энергию механизма в начальном положении
T0 = Jп0 * w210 / 2
Находим отрезок, который будет изображать на графике отр T0= T0 / mt
10. Откладываем от точки О вниз найденное значение отр T0, обозначим эту точку От.
11. Выберем поизвольную точку N и соединим ее с От.
12. Найдем tgyN = nОт / nN = (êT + T0) * mJ / mt = w21N * mJ / 2 * mt
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.