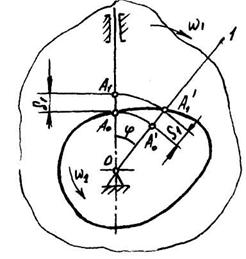
Определение положения толкателя в зависимости от положения кулачка можно было бы произвести обычным способом, т.е. повернуть кулачок на заданный угол φ (такое положение кулачка показано на рисунке пунктиром) и найти точку пересечения линии движения толкателя с профилем кулачка (точка A1), которая представляет искомое положение конца толкателя. Величина S1=A0A1 есть перемещение толкателя при повороте кулачка на заданный угол φ.
Однако такое построение сложно и неточно, так как требует дополнительного построения сложного профиля кулачка. Особенно сложно построение таким способом, если исследование следует произвести за весь цикл движения, т.е. за полный оборот кулачка. В этом случае прошлось бы строить целый ряд профилей кулачка.
Задача значительно облегчается, если применить так называемый метод обращения движения. Этот метод заключается в следующем.
Сообщим всему кулачковому механизму вместе со стойкой вращательное движение вокруг оси вращения кулачка 0 с угловой скоростью ω1 (рис. 4). Относительное движение звеньев от этого не изменится. Но тогда кулачок относительно неподвижных осей координат станет неподвижным, а толкатель вместе со стойкой будет вращаться вокруг оси вращения кулачка в противоположную сторону с угловой скоростью, равной по абсолютной величине угловой скорости кулачка. Поэтому вместо того, чтобы поворачивать кулачок на заданный угол φ, следует повернуть толкатель (вместе со стойкой) на этот же угол, но в противоположное направление. Линия движения толкателя при этом займет положение 0-1, которое является искомым относительным положением толкателя. Точка пересечения линии 0-1 с профилем кулачка А1’ есть искомое относительное положение конца толкателя.
Для определения действительного искомого положения конца толкателя достаточно радиусом 0А1’ сделать засечку на действительной линии движения толкателя. Полученная точка A1 есть действительное искомое положение конца толкателя. Отрезок S1 = А0А1 есть искомое перемещение толкателя. Это перемещение можно измерить и по линии относительного положения толкателя 0-1, для чего надо на этой линии сделать засечку радиусом 0А0 (точка А0’). Отрезок A0’ A1’ также есть искомое перемещение толкателя S1 = А0’ А1’. При указанных построениях положение стойки показывать не следует. Необходимо наносить лишь относительное положение линии движения толкателя.
|
|
Рис. 4. Определение положения толкателя по методу обращения движения (по методу инверсии)
Центральный кулачковый механизм с толкателем, снабженным роликом (Рис. 5).
В этом случае задача об определении положения и перемещения толкателя при повороте кулачка на угол φ решается следующим образом. Центр вращения ролика (точка А) всегда находится
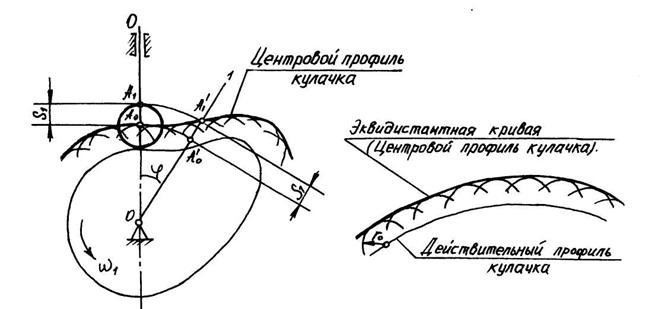
Рис. 5. Определение положения Рис. 6. Построение
толкателя, снабженного роликом, эквидистантной кривой
для центрального кулачкового механизма
от действительного профиля кулачка на расстоянии, равном радиусу ролика r0, т.е. он перемещается относительно кулачка по равноудаленной от его профиля на величину r0 эквидистантной кривой, которая называется центровым профилем кулачка. Следовательно, для кинематического исследования кулачковый механизм с толкателем, снабженным роликом, может быть заменен кулачковым механизмом с острым толкателем, в котором кулачок выполнен по центровому профилю.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.