|
t, c |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
|
h(t), B |
0,000 |
0,222 |
0,731 |
1,007 |
1,059 |
1,032 |
1,006 |
0,997 |
0,997 |
Продолжение таблицы 14
|
t, c |
0,9 |
1 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
|
h(t), B |
0,999 |
1 |
1 |
1 |
1 |
1 |
1 |
Переходная характеристика представлена на рисунке 22.
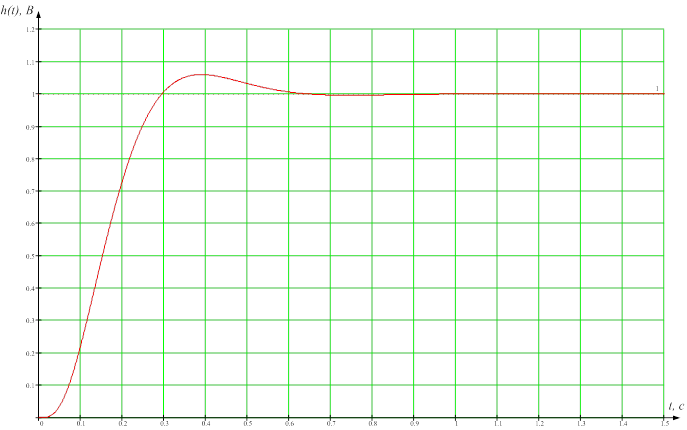
Рисунок 22 — Переходной процесс после синтеза АСР
Переходной процесс корректированной системы построенный в VisSim представлен на рисунке 23.
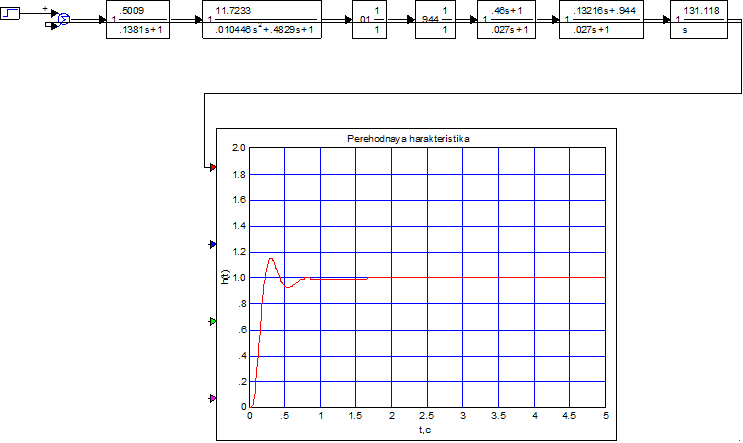 Рисунок 23 —
Переходной процесс после синтеза АСР
Рисунок 23 —
Переходной процесс после синтеза АСР
2.7 Анализ качества переходного процесса после синтеза
По известному переходному процессу можно определить прямые показатели качества:
Вид переходного процесса – сходящийся с перерегулированием, следовательно, система работоспособна;
Установившееся значение (статическое отклонение):
![]() (В);
(В);
Максимальное отклонение регулируемой величины или динамическое отклонение:
![]() , (В);
, (В);
Статическая ошибка (так как система астатическая, то):
![]() ;
;
Время нарастания:
![]() (с);
(с);
Время достижения первого максимума:
![]() (с);
(с);
Время переходного процесса (время регулирования):
![]() (с);
(с);
Перерегулирование:

Данное значение не превышает диапазон σ ≤ 30 – 40%, следовательно, качество регулирования – удовлетворительное.
ЗАКЛЮЧЕНИЕ
В ходе проделанной курсовой работы были закреплены основные положения теории автоматического управления, а также получены практические навыки расчета систем автоматического регулирования.
В результате расчета выбран двигатель МИ-32, генератор П-31 и тахогенератор ТГ-4, для каждого из них найдена передаточная функция, а также общая передаточная функция системы.
После выбора исполнительного двигателя система была проверена на устойчивость. При помощи метода трапеций построен переходный процесс, анализ которого показал, что система устойчива, но качество регулирования не удовлетворительное, так как время регулирования весьма велико. Чтобы это исправить требуется синтез.
Синтез выполнен методом логарифмических амплитудно-частотных характеристик. В процессе синтеза было выбрано последовательное корректирующее устройство, так как оно не требует сложных математических расчетов, проще включается в цепь и не требует большой точности АСР.
Далее найдена логарифмическая амплитудно-частотная характеристика конкретного корректирующего устройства, для которого были рассчитаны все необходимые параметры.
После чего в передаточную функцию системы было включено это корректирующее устройство, и система проверена на устойчивость.
Как показал критерий Гурвица, после расчета корректирующего устройства система осталась устойчивой, и качество процесса регулирования улучшилось. В том числе время регулирования сократилось с 12,45 с до 0,96 с, что даже меньше заданного (1,5 с). Следовательно, синтез автоматической системы регулирования выполнен корректно и требуемая задача выполнена.
При выполнении данной работы были использованы следующие пакеты прикладных программ:
MathCAD – Для математических вычислений и построения графиков;
Excel – Для составления таблиц данных;
VisSim – Для общего контроля выполняемых действий;
Word 2002 – Для создания, обработки и переработки текстового материала.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Расчёт автоматических систем.: учеб. А.В. Фатеев, А.А. Вавилов, Л.П. Смольников. – М. : высш. шк., 1973. – 336 с.
2 Хлыпало, Е.И. Нелинейные системы автоматического регулирования: расчёт и проектирование : учеб. пособие. – Л. : Энергия, 1967, 452 с.
3 Теория автоматического управления: В 2 ч./ Под ред. А.В.Нетушила. М.:Высш шк., 1968. Ч.1-2.-424с.
4 Теория автоматического управления: метод. указания к курсовой работе для студентов специальности 220301 (210200) «Автоматизация технологических процессов и производств (по отраслям)» / сост. В.А. Осипова; ГУЦМиЗ. – Красноярск, 2005. – 28 с.
5 Солодовников, В.В. Теория автоматического регулирование. Книга 2. Анализ и синтез линейных непрерывных и дискретных систем автоматического регулирования. Москва, Машиностроение. ̶ 1967, 682 с.
6 Рязанов, Ю.А. Проектирование систем автоматического регулирования.
2-е переработанное и дополненное издание. М., «Машиностроение». ̶ 1967, 359 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.