![]() (дБ),
(дБ), ![]()
Для расчета элементов схемы зададимся сначала R2: R2 = 10 кОм.
Значение R1 вычислим по следующему выражению:
![]() (кОм).
(кОм).
Значение С1находим следующим образом: ![]()
![]()
![]() (мкФ).
(мкФ).
Вычисляем значение R3:
|
|
|
|
|
|
По стандартному ряду номиналов сопротивления и емкостей выбираем:
R1 = 6,2 кОм; R2 = 10 кОм;
R3 = 620 Ом;C1 = 43 мкФ.
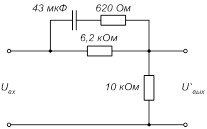
Рисунок 16 – Электрическая схема первого корректирующего устройства с рассчитанными параметрами
Передаточная
функция первого корректирующего устройства будет иметь вид: 
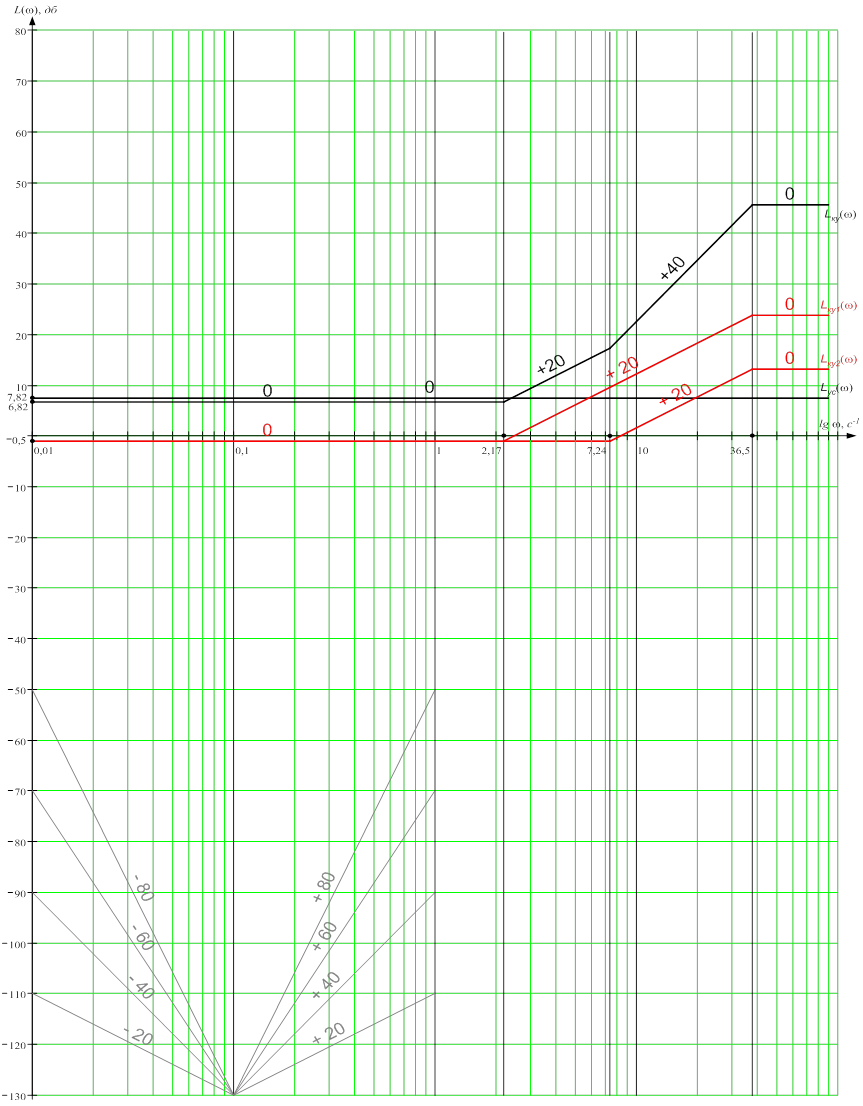
Рисунок 15 -Логарифмические амплитудно-частотные характеристики корректирующих устройств
2.3.2 Второе корректирующее устройство
Аналогично из справочника [3] выбираем:
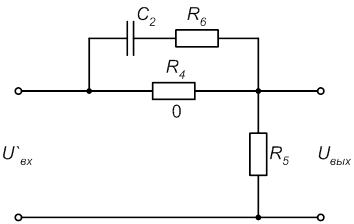
Рисунок 17 – Электрическая схема второго корректирующего устройства
Для нахождения передаточной функции корректирующего устройства рассчитаем его параметры. Из рисунка 15 следует, что:
 (с–1);
(с–1);  (с–1);
(с–1);
откуда можно найти постоянные времени:
![]() (с);
(с); ![]() (с).
(с).
Рассчитаем коэффициент передаточной функции:
![]() (дБ),
(дБ), ![]()
Для расчета элементов схемы зададимся сначала R5: R5 = 10 кОм.
Значение R4 вычислим по следующему выражению:
![]() (кОм).
(кОм).
Значение С1 находим следующим образом:
![]()
![]()
![]() (мкФ).
(мкФ).
Вычисляем значение R6:
|
|
|
|
|
|
По стандартному ряду номиналов сопротивления и емкостей выбираем:
R4 = 6,2 кОм;R5 = 10 кОм;
R6 = 1,5 кОм;C2 = 13 мкФ.
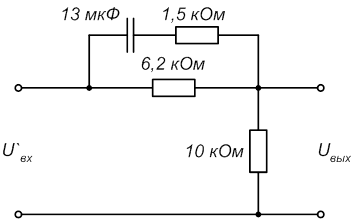
Рисунок 18 – Электрическая схема второго корректирующего устройства с рассчитанными параметрами
Передаточная функция второго корректирующего устройства будет иметь вид:

2.3.3 Общая корректирующая цепочка
Так как корректирующие устройства включены последовательно, то передаточная функция общей корректирующего устройства будет иметь вид:

Электрическая схема общего корректирующего устройства представлена на рисунке 19:
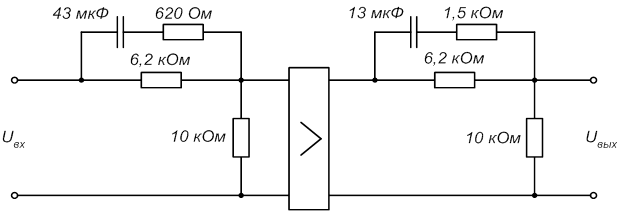
Рисунок 19 – Электрическая схема общего корректирующего устройства
А Электрическая схема всей скорректированной АСР изображена на рисунке 20:
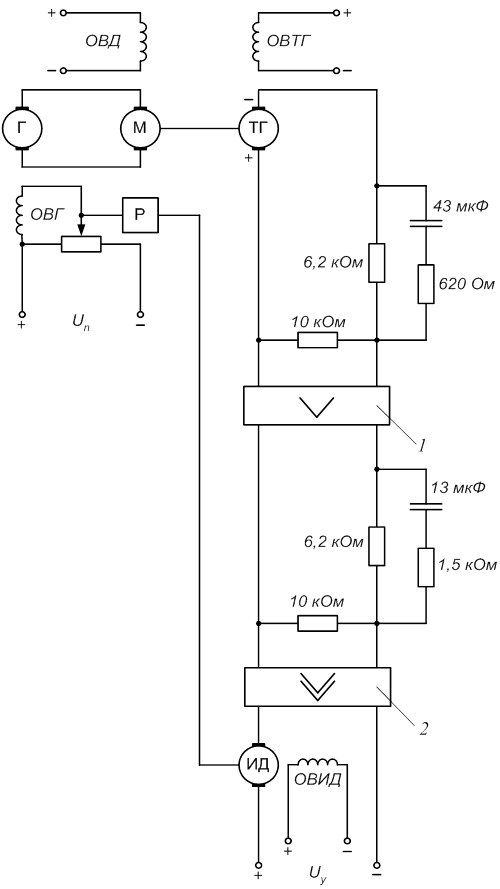
(1 – разделяющий усилитель; 2 – согласующий усилитель)
Рисунок 20 – Электрическая схема скорректированной АСР
2.4 Нахождение передаточных функций разомкнутой и замкнутой систем
Так как во время построения желаемой логарифмической амплитудно-частотной характеристики пришлось повысить коэффициент системы и так как само корректирующее устройство понижает уровень основного сигнала, то необходимо ввести усилительное звено с коэффициентом усиления Кус.
Из рисунка 13 следует, что:
20 lg Kус = 6,82 + 0,5 + 0,5 = 7,82 (дБ);
Тогда: Kус = 107,82/20 = 2,46.
В результате необходимо ввести усилитель, логарифмическая амплитудно-частотная характеристика которого показана на рисунке 10.
Так как рассчитанное нами корректирующее устройство последовательное, то передаточную функцию разомкнутой системы найдем путём перемножения передаточных функций некорректированной системы, корректирующего устройства и усилительного звена.

Рисунок 21 – Структурная схема скорректированной системы автоматического регулирования
Передаточная функция разомкнутой системы
будет иметь вид: ![]()


Тогда передаточная функция замкнутой системы будет иметь вид:
 ;
;


2.5 Исследование устойчивости АСР
Передаточная функция скорректированной замкнутой АСР имеет вид:
Характеристическое уравнение имеет вид:
![]()
Так как правило Стодолы выполняется, т.е. все коэффициенты характеристического уравнения положительны, то для определения устойчивости замкнутой системы воспользуемся критерием Гурвица.
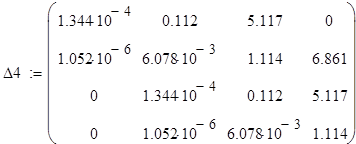
Составим главный определитель Гурвица и его диагональные миноры. Решение проведем с помощью программы MathCAD.

![]()
![]()
![]()
![]()
Главный определитель Гурвица и все его диагональные миноры больше нуля, следовательно, система в замкнутом состоянии после синтеза устойчива.
2.6 Построение переходного процесса
Передаточная функция скорректированной замкнутой АСР имеет вид:
Переходная характеристика определяется как:
Обратным преобразованием Лапласа с помощью MathCAD находим переходную функцию h(t):
![]()
![]()
Найдем значения этой переходной характеристики и данные сведем в таблицу.
Таблица 14 — Данные для построения переходной характеристики
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

 (Ом).
(Ом).

 (кОм).
(кОм).