Различают следующие ЭЗМ: клиновые с однокосым клипом и клиноплунжерные с одним плунжером (без роликов или с роликами), которые обычно используют в качестве усилителей пневмо- и гидроприводов; клиновые и многоплунжерные самоцентрирующие, применяемые в конструкциях оправок (например, оправки конические и кулачковые) (см. т. 2).
Преимущества: простота и компактность конструкции; удобство в наладке и эксплуатации; способность к самоторможению (механизмы с роликами не являются самотормозящими); постоянство сил закрепления, которые не зависят от допуска на размер заготовки.
Недостатки: сосредоточенный характер сил закрепления, что затрудняет использование этих механизмов при обработке нежестких заготовок; низкая надежность, которая зависит от характера клинового сопряжения, формы поперечного сечения плунжеров и пазов под плунжеры, зазоров между плунжерами и пазами, защищенности механизма от стружки.
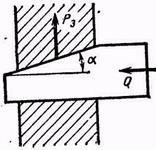
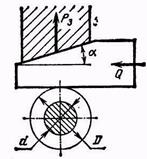
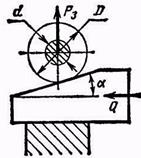
Детали клиновых и клиноплунжерпых ЭЗМ: клин, к которому приложена сила Q от привода; плунжеры (кулачки), развивающие силу закрепления Pз; корпус с пазами, в которых перемещаются клип и плунжеры (кулачки); опорные ролики (если в механизме предусмотрено их использование).
Важнейшим конструктивным элементом является угол скоса клина α. С уменьшением угла α увеличивается выигрыш в силе (ic=Pз/Q), но одновременно увеличивается проигрыш в перемещениях (ip=S(Q)/S(Pз)=ctgα). Здесь S(Pз) и S(Q) - перемещение плунжера (кулачка) и клина соответственно; ic зависит от потерь на трение; ip зависит только от угла α (таблица 12).
В механизмах без роликов для обеспечения надежного самоторможения рекомендуется угол α<5°30', а в несамотормозящих механизмах с роликами — α>10°.
Расчет клиновых и клиноплунжерных ЭЗМ для непосредственного закрепления заготовки *. 1. Исходные данные: Рз — сила закрепления заготовки, Н; δ - допуск на размер заготовки, мм (из чертежа заготовки).
2. Выбирают принципиальную схему механизма и угол α скоса клина.
3. Определяют ход плунжера (кулачка) S(Рз)=
=δ+∆гар+∆S(Рз)+Рз/J, где ∆гар=0,2÷0,4 мм — гарантированный зазор для свободной установки заготовки; ∆S(Рз)=0,2÷0,4 мм - запас хода плунжера (кулачка), учитывающий погрешности изготовления и износ механизма; J — жесткость механизма; ориентировочно J = 1000÷2500 кН/м. При проектировании двухплунжерного механизма следует принимать J = 2500÷3500 кН/м; S(Рз) — ход каждого из двух плунжеров.
4. Ход клина S(Q)=S(Pз)ctgα.
5. Сила на приводе Q=Pз : ic.
Стандартные клиновые ЭЗМ показаны в таблице 13 и таблице 14, а примеры применения клиновых ЭЗМ в конструкциях СП—на рисунке 7.
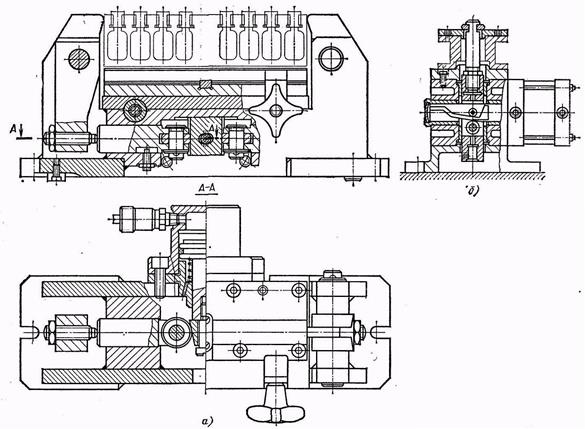
а — наладочное приспособление для фрезерования валиков; б — прижим с основанием (ГОСТ 21619—76)
Рисунок 7 - Примеры применения клиновых ЭЗМ
________________________
* Расчёт клиновых и клиноплунжерных «ЭЗМ, работающих в сочетании с прихватами и рычагами см. ниже.
Таблица 12 - Передаточные отношения сил ic и iП клиновых и клиноплунжерных ЭЗМ
|
Механизм |
ic |
ic при угле скоса клина α˚ |
|||||||
|
2 |
5 |
8 |
10 |
12 |
15 |
20 |
25 |
||
|
Клиновые ЭЗМ |
|||||||||
|
С трением скольжения на обеих поверхностях клиньев |
1/[tg(α+φ)+tgφ1] |
4,2 |
3,4 |
2,9 |
2,6 |
2,4 |
2,1 |
1,7 |
1,5 |
|
С трением сколь-жения на наклонной поверхности и с роликом на горизон-тальной поверхности |
1/ [tg(α+φ)+tgφ1пр] |
5,3 |
4,1 |
3,4 |
3 |
2,7 |
2,3 |
1,9 |
1,5 |
|
С роликом на наклон-ной поверхности и с трением скольжения на горизонтальной поверхности |
1/[tg(α+φпр)+ +tgφ1] |
5,4 |
4,2 |
3,4 |
3,1 |
2,7 |
2,4 |
1,9 |
1,6 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.