Для двумерного случая можно получить простые формулы. Запишем
n11z1 + n12z2 = lz1
n21z1 + n22z2 = lz2 (80)
или,
(n11-l)z1 + n12z2 =0
n21z1 + (n22-l)z2 =0
или в матричном виде:
(N - lE) z = 0 (81)
где .
.
Чисто формально:
 .
.
![]()
следовательно,![]() .
.
Так как Z произвольный вектор и, в общем случае не нулевой, то
![]()
Запишем для двумерного случая.
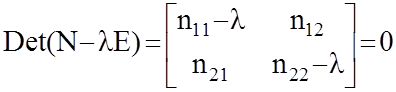
(n11 - l) (n22 - l) - n21 n12 = 0
Это квадратное уравнение. Решая его относительно l и, принимая во внимание, что n21 = n12 , так как матрица N симметрическая, получим:
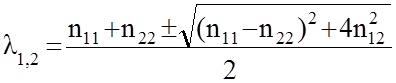 (82)
(82)
Определим ориентацию собственных векторов, соответствующих найденным собственным значениям. Считая l известным, подставим это значение в (80) и разрешим эту систему относительно z1 и z2,учитывая, чтоz1= cos(Y), z2= sin(Y) .
Первое уравнение системы (80) будет выглядеть так:
n11cos(Y) + n12sin(Y) = l cos(Y)
Разделим первое левую и правую часть на cos(Y).
n11 + n12tg(Y) = l
Откуда
tg(Y) =(l - n11)/ n12(83).
Y = arctg ((l - n11)/ n12)(84).
Таким образом, фактически получено направление большой полуоси эллипса Y относительно норда. Если в 3.10 подставить другое значение l то получим направление малой полуоси, но так как они ортогональны, то практически это не требуется.
Для отыскания полуосей необходимо извлечь квадратные корни из собственных чисел.
![]()
![]() (85)
(85)
Когда говорят об оценке точности, то обычно добавляют слова априорная или апостериорная. Априорная - это оценка точности, выполненная по информации о погрешностях измерений полученной ранее. Как правило, такая информация о точности измеряемых навигационных параметров основывается на многочисленных статистических исследованиях, которые происходили до конкретной обсервации в каких-то осредненных условиях. Именно такая информация, как правило, содержится в ковариационной матрице погрешностей измерений используемой при расчете координат. В формуле (74) она обозначена как D . Если погрешности измерений статистически независимы, то внедиагональные элементы равны нулю и матрица имеет вид:
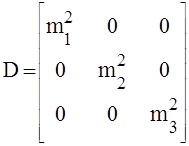
Именно эти погрешности в соответствии с правилом переноса погрешностей и формируют априорную ковариационную матрицу определяемых параметров.
Процедура построения эллипса погрешностей по ковариационной матрице сводится к следующему.
· Рассчитываем собственные значенияlпо формуле (82)
· Определяем угол ориентации Yпо формуле (84)
· Рассчитываем полуоси по(85)
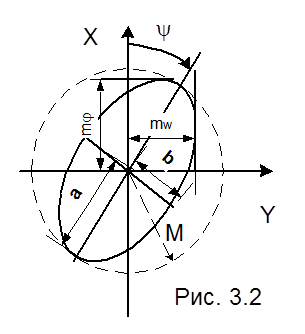
На рис. 3.2 показана связь
между элементами ковариационной матрицы и эллипсом. Отрезок, заключенный между
касательной к эллипсу параллельной оси Y и самой осью соответствует СКП по
широте, или
![]() (86)
(86)
Отрезок
на оси Y , отсекаемый вертикальной касательной соответствует СКП по отшествию ![]() (87)
(87)
На рисунке также показана средняя квадратическая погрешность (СКП) обсервации М, которая рассчитывается, как корень квадратный из следа ковариационной матрицы либо с помощью полуосей эллипса (88):

В априорной оценке использовалась информация о точности, полученная по результатам предыдущих измерений, а в апостериорной оценке участвуют текущие измерения, т.е. по которым была вычислена вероятнейшая точка.
Допустим, что ковариационная матрица погрешностей измерений D известна с точностью до постоянного множителя:
D=m2K; D-1=K-1/m2; K-1= m2D-1:
где матрица K известна, а величина m2 неизвестна.
Иными словами известны относительные, а не абсолютные значения матрицы D. С учетом этого рассмотрим систему нормальных уравнений
![]() (89)
(89)
Подставим вместо D-1
выражение ![]()
Величина m2 (дисперсия наблюдения с единичным весом) сокращается и решение, в итоге, не зависит от абсолютной величины элементов ковариационной матрицы измерений D . Матрицу K-1 также называют "весовой" и обозначают через W ,а m2 - дисперсией наблюдения с единичным весом. Если m2 не выносилась из D , то весовой будет просто D-1.
Рассмотрим величину
![]() (90)
(90)
Она представляет собой обобщенную (взвешенную) остаточную сумму квадратов уклонений. Здесь M - операция взятия математического ожидания. Упрощенно ее можно рассматривать как отыскание среднего значения
Рассмотрим выражение в последней скобке, то есть пока без операции взятия матожидания:
 (91)
(91)
Последнее слагаемое равно
0. Векторы ![]() и
и  ортогональны,
а скалярное произведение таких векторов равно 0. Тогда
ортогональны,
а скалярное произведение таких векторов равно 0. Тогда
![]() (92)
(92)
Кроме этого,
![]() (93)
(93)
Во втором слагаемом
произведение ![]() представляет собой правую
часть системы нормальных уравнений, тогда вместо нее запишем левую
представляет собой правую
часть системы нормальных уравнений, тогда вместо нее запишем левую ![]() , тогда окончательно получим:
, тогда окончательно получим:
 (94)
(94)
По этой формуле можно
посчитать значение квадратичного критерия (остаточную сумму квадратов невязок).
Здесь DU - вектор, рассчитанный по исходным данным UИ
- Uc и первое слагаемое в правой части дает значение остаточной
суммы в начальной (счислимой) точке, а второе слагаемое уменьшает это значение
за счет смещения к оптимальной точке на величину ![]() .
.
С учетом взятия операции матожидания (94) справедливо следующее:
![]() (95)
(95)
Распишем первое слагаемое:
 (96)
(96)
Правило ![]() легко проверяется простым
перемножением матриц небольшой размерности.
легко проверяется простым
перемножением матриц небольшой размерности.
Распишем второе слагаемое:
 (97)
(97)
С учетом (95) получим:
![]() (98)
(98)
Несмещенная оценка ![]() дается выражением:
дается выражением:
 (99)
(99)
Тогда апостериорную оценку ковариационной матрицы погрешности результатов получим следующим образом:
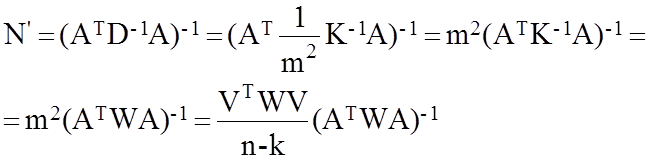 (100)
(100)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.