Логарифмическое нормальное распределение получается в том случае, если логарифм случайной величины lnx имеет нормальное распределение.
Распределение Релея является распределением амплитуд суммы гармонических колебаний со случайными фазами. Применяется для описания характеристик колебательных процессов.
Распределение Лапласа, называемое также двусторонним экспоненциальным, имеет нулевое математическое ожидание и плотность вероятности с одним параметром. Кривая такого распределения имеет острую вершину и «приподнятые хвосты» - увеличенную вероятность больших погрешностей.
В отдельных случаях обсерваций необходимо оценить смещение места судна под действием предполагаемых систематических ошибок измерителей. В частности, такая задача может ставиться при планировании рейса на этапе предварительной прокладки для оценки всевозможных, в том числе наихудших для безопасности мореплавания, смещений при прохождении узкостей.
Рассмотрим ситуацию возникновения
систематического сдвига обсервованной точки (рис. 6.27). В результате действия
систематических ошибок l1, l2 в измеренных навигационных
параметрах место судна кажущимся образом переместилось из положения О в точке
О'. Смещение s можно считать равнодействующим независимых смещений w1 и
w2
линий положения одна по другой. В этом отношении w1 и
w2, 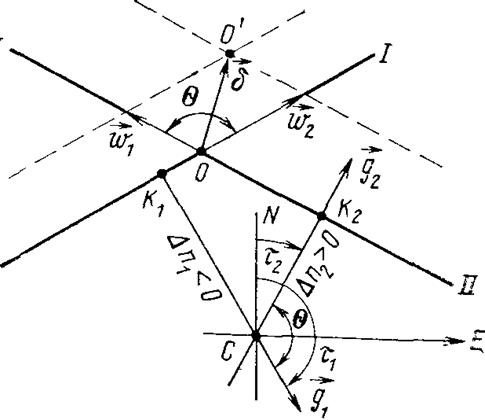
Рис. 21. Графоаналитический способ определения смещения места судна под действием систематических погрешностей измерителей
являются аналогами векториальных ошибок, отличаясь лишь жестко фиксированным направлением в соответствии с заданным знаком систематических погрешностей l1, l2. Опираясь на такую аналогию, можно получить следующие расчетные выражения для величин смещений ЛП:
DЛП2 = l1/g1; DЛП1 = l12/g2 (103)
w1 = DЛП1/sinq; w2 = DЛП2/sinq;
Величину s определим как модуль вектора, построенного на векторах w1 и w2 с угломq между этими векторами. Запишем равенство s=w1 +w2 и составим скалярные произведения векторов в левой и правой частях, т. е. вычислим проекции одного вектора по другому:
![]()
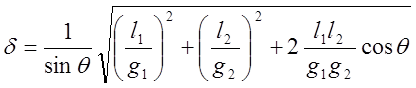
Отсюда длина результирующего вектора определится формулой
![]() (104)
(104)
Из рис. 21 и формулы (104) видно, что важно брать угол q именно между направлениями w1 и w2. Если угол между векторами острый (cosq>0), то вектор смещения о по модулю больше, чем при тупом угле (cosq<0). Отсюда следует, что в задаче оценки систематических смещений места судна всегда требуется рассчитывать q, как угол между направлениями градиентов ЛП, а не самих линий положения.
Подставив в формулу (104) вспомогательные формулы (103), получим результирующее выражение оценки величины смещения обсервованного места под влиянием систематических погрешностей измерений
 (105)
(105)
Следующей, весьма важной задачей, связанной с систематическими погрешностями места судна, является исключение влияния неизвестных систематических погрешностей измерителей на определение места судна. В решении данной задачи возможны два варианта, которые базируются на различных путях решения системы уравнений линий положения типа (45). Необходимым условием здесь выступает минимальная избыточность измерений навигационных параметров, т. е. требование, по крайней мере, еще одной линии положения, в которой есть то же самое неизвестное, но постоянное смещение DЛП =const.
Система таких уравнений с учетом деления каждого из уравнений на модуль своего градиента может быть представлена в следующем виде:
Dj cos t1 + Dw sin t1 + Dлп = Dn1
Dj cos t2 + Dw sin t2 + Dлп = Dn2 (106)
Dj cos t3 + Dw sin t3 + Dлп = Dn3
Совершенно ясно, что три неизвестных однозначно определятся из трех уравнений, следовательно, будут найдены не только поправки счислимых координат, но и систематическое смещение линий положения. Через значение модулей градиентов могут быть найдены и достоянные погрешности навигационных параметров.
Решить данную систему уравнений можно различным образом: методом последовательного исключения Гаусса, через определители по формулам Крамера или численными методами, связанными с процедурами последовательных приближений.
Второй вариант борьбы с систематическими погрешностями предусматривает формирование так называемой разностной, линии положения (РЛП). Вычитая в системе (6.82) из уравнении первой ЛП последовательно уравнения второй и третьей ЛП, получим систему из двух РЛП, где систематическая погрешность линий положения исключена:
(cos t1 – cost2)Dj + (sint1 - sint2)Dw = Dn1 - Dn2 (107)
(cos t1 – cost3)Dj + (sint1 - sint3)Dw = Dn1 - Dn3
Принцип РЛП широко используется в навигации. Например, существует задача обсервации по трем пеленгам навигационных ориентиров, когда не известна поправка компаса DК. В этом случае можно перейти к определению места по двум горизонтальным углам, каждый из которых есть разность соответствующих пеленгов:
a = КП1 – КП2 = (ИП1 - DК) – (ИП2 - DЛ) = ИП1 – ИП2 (108)
b = КП1 – КП3 = (ИП1 - DК) – (ИП3 - DЛ) = ИП1 – ИП3
Видно, что неизвестная поправка компаса здесь полностью исключается из преобразованного навигационного параметра. Подобный подход эффективен только в том случае, когда систематическая погрешность существенно превалирует над случайной.
Принцип разностных ЛП положен в основу разностно-дальномерных РНС, где компенсируется часть систематической погрешности, вызванной неизвестным значением скорости распространения электромагнитных волн, несущих информацию о дальности до навигационных ориентиров. Переход к разности расстояний позволяет значительно снизить влияние неточного знания скорости света в реальных условиях. До конца устранить такую погрешность все же не удается ввиду расположения трасс распространения волн с различным сочетанием состояний поверхности «море—суша».
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.