Согласно закону сохранения импульса суммарный импульс замкнутой системы не меняется со временем, следовательно, можно записать:
mu=(М + т)и. (1)
Здесь mu– импульс пульки до удара, (М + т)и – импульс маятника с застрявшей в цилиндре после удара пулькой, (m– масса пульки, М – масса баллистического маятника). Масса спицы мала по сравнению с массой цилиндра, ей можно пренебречь. Из равенства (1) определим скорость маятника в момент времени непосредственно после завершения процесса столкновения:
и =  u.
(2)
u.
(2)
Интервал времени столкновения Dt1 во много раз меньше времени Dt2 = t3 - t2 подъёма маятника (Dt1<<Dt2), поэтому за время столкновения шарик уже практически остановится относительно цилиндра, сообщив последнему начальную скорость, а цилиндр еще не успеет сдвинуться на заметную величину. Таким образом, две части процесса превращения энергии происходят последовательно друг за другом, и рассматривать их можно раздельно.
Рассмотрим теперь систему пулька – цилиндр – земля. Эта система замкнута и, кроме того, во время подъёма в ней действуют уже только консервативные силы (трением в подшипнике на оси датчика поворота пренебрегаем). Вспомним закон сохранения механической энергии: в замкнутой системе, в которой действуют лишь консервативные силы, полная механическая энергия не меняется со временем.
Сказанное означает, что кинетическая энергия, которую приобретает маятник к моменту времени t3перейдет в потенциальную энергию поднятой на высоту h массы (М + т) цилиндра с пулькой внутри.
Кинетическая энергия WК в начале движения системы записывается так:
WК =  u2=
u2=  =
=  . (3)
. (3)
Потенциальная энергия WП поднятого на высоту h маятника равна:
|
и на основе закона сохранения энергии можно записать:
= (М + т)gh.
(5)
Решая уравнение (5) относительноu, получаем:
u=![]()
![]() .
(6)
.
(6)
Высота поднятия центра масс маятника при известном расстоянии l от точки подвеса до цилиндра определяется по углу отклонения a маятника, который измеряется датчиком угла поворота.
На рис. 2в схематически показано как происходит поднятие маятника на высоту h в результатеего отклонения на уголa. Из прямоугольного треугольника ОА'С следует, что
ОС = Н = l соs a,
h=АО - ОС = l - Н = l - l cos a, или:
h = l (1 -соs a) (7)
Подставляя (7) в (6), получим расчетную формулу для определения скорости шарика:
u=![]()
![]() , или
, или
u= 2![]()
![]() sin
sin![]() . (8)
. (8)
Порядок выполнения работы
1. Соберите установку как показано на рис. 1. Обратите внимание на то, что ось вращения датчика должна быть горизонтальной, а ось цилиндра должна располагаться в плоскости колебаний маятника.
С помощью линейки измерьте расстояние от оси цилиндра баллистического маятника до оси вращения датчика угла поворота. Полученную величину запишите в таблицу 1. Туда же занесите значения массы цилиндра маятника и пульки (указаны на установке).
|
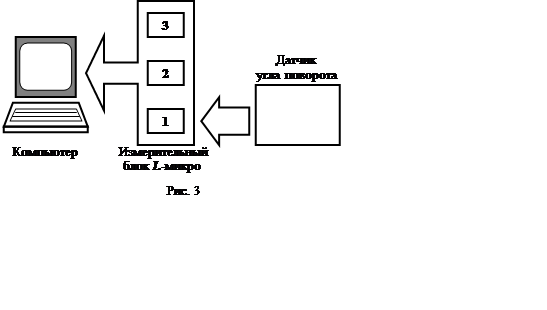
3. Запустите программу L-phys.ехе, выберите пункт меню «СПИСОК РАБОТ» и в появившемсяна экране списке выберите лабораторную работу «Измерение скорости тела методом баллистического маятника».
4. Датчик угла поворота регистрирует углы в интервале 0 ¸ 3600°, т. е. делает 10 оборотов вокруг своей оси, однако наибольшая точность измерений достигается в диапазоне 0 ¸ 360°. Для того, чтобы угол отклонения маятника при измерениях не выходил за рамки указанного интервала, его положение равновесия должно быть в диапазоне углов 90 ¸ 270°. Цифры на экране будет соответствовать текущему значению угла, регистрируемого датчиком. Установите требуемое значение угла положения равновесия, аккуратно вращая маятник вокруг оси датчика и при необходимости, сняв датчик со штатива и повернув его корпус на 180°.
5. Зарядите метательное устройство. Утопите шток, толкающий пульку, внутрь цилиндрической части корпуса. При этом Вы сожмете пружину, которая находится внутри корпуса. После этого вложите пульку в желоб так, чтобы она касалась конца штока.
|
Произведите выстрел (нажмите кнопку на корпусе метательного устройства) и уберите метательное устройство, чтобы маятник мог беспрепятственно двигаться после возврата в положение равновесия.
Таблица 1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.