Лабораторная работа № 5
Исследование работы системы управления курсовой устойчивостью автомобиля
1. Цель лабораторной работы
Целью лабораторной работы является закрепление теоретических знаний об устройстве и принципах работы системы управления курсовой устойчивостью автомобиля.
2. Задачи лабораторной работы
К задачам лабораторной работы относятся:
1. Изучение назначения, устройства и принципа работы системы управления курсовой устойчивостью автомобиля.
2. Исследование работы системы управления курсовой устойчивостью на этапе определения фактического угла увода автомобиля.
3. Исследование работы системы управления курсовой устойчивостью на этапе определения типа заноса автомобиля.
.
3. Краткие теоретические сведения
В штатных условиях движения траектория перемещения автомобиля по дорожному полотну задается управляющими манипуляциями водителя. Эти манипуляции, с помощью соответствующих датчиков, преобразуются в электрические сигналы угла поворота рулевого колеса, крутящего момента двигателя (по углу поворота оси дроссельной заслонки) и давления жидкости в тормозной системе.
Однако этих сигналов для автоматической стабилизации устойчивости движения в критических ситуациях недостаточно и дополнительно требуется информация о таких непрерывно изменяющихся величинах, как угол бокового увода передних колес (α), угол бокового сноса автомобиля (β), боковое скольжение (S) колес относительно дорожного покрытия и его направление (угол γ), коэффициент (μ) сцепления колес с дорогой. Все эти величины являются входными вариационными параметрами системы VDC и значительно влияют на траекторию движения автомобиля, как только под колесами появляется юз.
На рисунке 1 показано, какую траекторию будет описывать автомобиль, заходящий на скорости 80 км/час в крутой поворот при одном и том же неизменном положении руля, на постоянном газе без торможения, но при различных состояниях дорожного покрытия. Кривая «А» соответствует траектории поворота автомобиля с радиусом 40 м на сухом асфальте, когда боковое скольжение колес относительно дорожного покрытия не имеет места (μ > 0,95). Фактическое направление движения соответствует направлению, выбранному водителем посредством соответствующего поворота рулевого колеса. Кривая «В» отображает траекторию движения автомобиля при повороте на мокрой дороге сразу после дождя, когда асфальтное покрытие особенно скользкое ( μ < 0,65). Появляющееся боковое скольжение передних колес приводит к боковому сносу автомобиля от заданного рулем направления движения, и радиус поворота зависит не только от положения руля, но и от силы бокового увода. На зимней дороге при гололеде (μ <0,15) боковой снос автомобиля на повороте может стать настолько большим, что потеряется контроль над управлением и автомобиль независимо от действий водителя перейдет в перемещение по автодороге боковым юзом (кривая «С» на рис. 1) или, более того, может начать вращаться вокруг вертикальной оси.
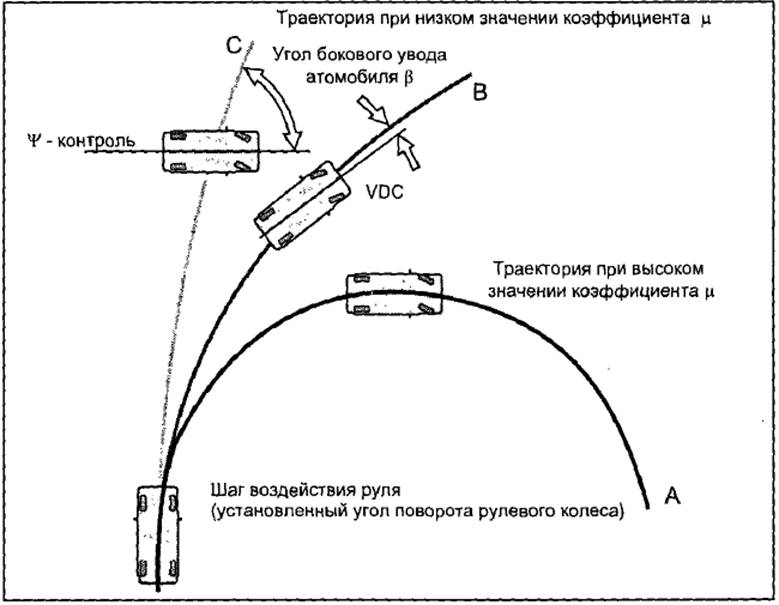
Рисунок 1 Зависимость траектории движения автомобиля от состояния полотна дорожного покрытия
Из рассмотрения траекторий, показанных на рисунке 1, очевидно, что при повороте автомобиля на скользкой дороге угол бокового увода (сноса) автомобиля должен быть ограничен значением, при котором коэффициент сцепления μ колес с дорогой не становится меньше критического для данных состояний эластичности протектора колесных шин и дорожного покрытия. Одним из способов повышения коэффициента сцепления μ является применение в зимнее время более жесткой шипованной колесной резины.
На рисунке 2, а приведена векторная диаграмма сил, приложенных к переднему колесу во время движения автомобиля на повороте, которая отображает физическую картину потери устойчивости при появлении юза под колесами.
На рисунке 2, б показаны точки приложения векторных сил и момента разворота вокруг вертикальной оси, а также линейные координаты а, b, с, d этих точек относительно центра масс в системе координат х, у, z.
Угол α бокового увода колеса возникает под воздействием боковой силы FS когда эластичная шина деформируется в боковом направлении, в результате чего вектор скорости V автомобиля отклоняется от плоскости вращения колеса.
Увеличение боковой силы FS является главной причиной увеличения угла а. Отношение Ку = FS /α называется коэффициентом сопротивления уводу.
Если угол а достигает значений 12...20°, то боковая сила FS на сухом асфальте становится равной силе Fс сцепления шины колеса с дорогой (FS = Fс) и увод колеса переходит в его боковое скольжение (юз).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.