1. Автомобиль имеет задние ведущие колеса и передние управляющие колеса.
2. Автомобиль движется по криволинейной траектории (движение на повороте).
3. В качестве модели автомобиля выбрана четырехколесная модель.
4. Автомобиль имеет жесткие колеса, как следствие отсутствует увод колес и смещение полюса поворота относительно задней оси хр = 0.
5. Начальные значения проекций скорости автомобиля на его продольную и
поперечную оси принимаем равными значениям этих проекций при равенстве
теоретического и фактического углов увода ψт. = ψф. При этом датчик скорости жестко ориентирован вдоль продольной оси
автомобиля. Поэтому ![]() . В данном случае
. В данном случае ![]() ,
,
![]() .
.
6. Расчет и формирование крутящего момента (мощности) двигателя и стабилизирующего момента корпуса автомобиля начинается при разности теоретического и фактического углов увода автомобиля ׀ψт – ψф ׀ > 30.
В работе принимаются следующие значения параметров и характеристик:
· расстояния от центра масс автомобиля до передней А и задней В осей равны А = В = 1,5 м;
· база автомобиля L = А + В = 3 м;
· координата смещения полюса поворота относительно задней оси хр = 0 (колеса жесткие);
· колея автомобиля равна В1 = 1,8 м;
· угловая скорость автомобиля вокруг вертикальной оси ωz = 1 – 2 1/с;
· угол поворота передних колес φ = 10 – 200;
· радиус колеса R = 0,3 м;
· продольная ax и поперечная aу составляющие ускорения автомобиля ax = 0,1 м/с2 – 2,0 м/с2, aу = 0,1 м/с2 – 2,0 м/с2.
Порядок определения начала заноса автомобиля:
1. Определение расчетного (теоретического) угла увода автомобиля:
С учетом допущений:
2. Определение начальных значений проекций скорости автомобиля, считая ψт = ψФ:
![]() ;
; ![]() .
.
3. Определение текущих значений проекций скорости автомобиля путем решения системы дифференциальных уравнений:
![]()
![]()
Решение этой системы обыкновенных дифференциальных уравнений выполняется в программе Маthcad с использованием функции rkfixed с фиксированным шагом n = 10 (возможны изменения шага интегрирования).
4. Определение фактических значений угла увода автомобиля:
 ;
; ![]() .
.
5. Определение начала заноса автомобиля:
![]()
Условие начала заноса автомобиля проверяется на каждом шаге интегрирования. Для этого используется оператор цикла while с числом циклов, равных числу шагов интегрирования.
6. Определение типа заноса (передней или задней оси):
![]() > 0 – занос передней оси;
> 0 – занос передней оси;
![]() <
0 – занос задней оси.
<
0 – занос задней оси.
Тип заноса определяется с использованием условного оператора if.
5. Порядок проведения экспериментов
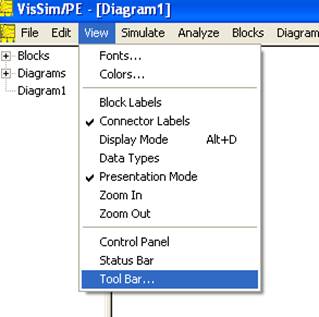
Запустите программу VisSim. Если при включении программы VisSim отсутствует панель инструментов:
Откройте пункт меню View и щелкните левой кнопкой «мыши» по строке Тооl Bar…:
Появится одна из панелей инструментов:
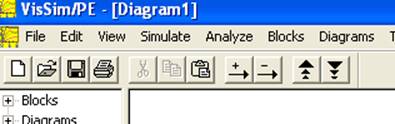
Установите курсор рядом с этой панелью и щелкните правой кнопкой «мыши». Появится панель:
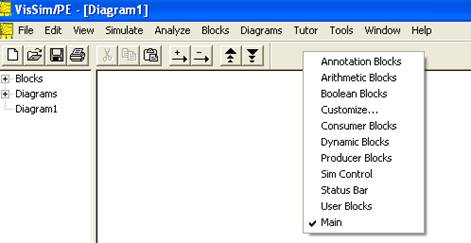
Установите флажки напротив каждой ее строки. Появятся все панели инструментов.
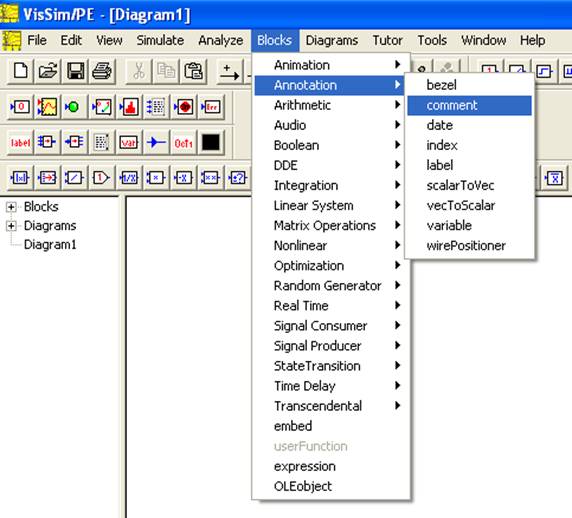
Поместите на рабочий стол надпись (пример):
«Студент группы 11-МБ-ЭТ1 Иванов Иван Иванович. Лабораторная работа № 6.Исследование работы системы управления курсовой устойчивостью автомобиля».
Для этого в меню Blocks (Блоки) выберете строку Annotation (Анатоционные), а в ней строку comment (Комментарий).
После щелчка в выбранном месте рабочего стола пунктирный прямоугольник превратится в прямоугольник показанный ниже. В нем будет мигать вертикальная линия, призывая набрать текст комментария. Наберите указанную ранее надпись:
В настройках моделирования меню «Simulate» выберите пунк «Simulation Properties…» и щелкните по нему левой кнопкой мыши. Появится понель настроек «Simulation Properties». Устанавливается время начала, конца моделирования и частоту соответственно: Start = 0, End = 20, Frequency = 5 (не забудьте нажать кнопку ОК). Если в появившейся панели настроек второе окно будет поименовано не Frequency, то нажмите на стрелу окна, расположенного правее, и выберите пунк Hertz.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.