1. Определите начальные значения составляющих скорости автомобиля
Наличие нулевых значений составляющих определяется тем, что процесс моделировании еще не запущен и , как следствие, сигналов с датчиков нет и нет необходимых исходных данных.
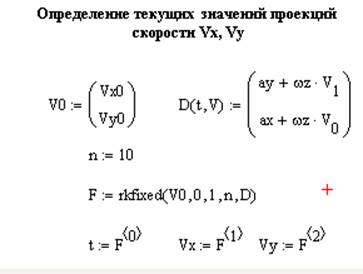
2. Определите текущие
значения составляющих вектора скорости. Будем считать, что автомобиль движется по
окружности радиуса R = 50 м с постоянной скоростью  .
Тогда тангенциальная составляющая ускорения при малом угле увода автомобиля
.
Тогда тангенциальная составляющая ускорения при малом угле увода автомобиля ![]() , а
нормальная составляющая
, а
нормальная составляющая  . Угловая
скорость автомобиля равна
. Угловая
скорость автомобиля равна ![]()
Для
этого последовательно введите начальные условия  .
.
Далее введите правые части дифференциальных уравнений системы
Т.е.
введите выражение 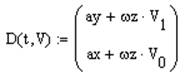 .
.
Введите
число шагов интегрирования n := 10. Введите стандартную функцию решения
системы обыкновенных дифференциальных уравнений ![]() .
Для этого вызовите окно стандартных функций и в нем найдите эту функцию.
.
Для этого вызовите окно стандартных функций и в нем найдите эту функцию.
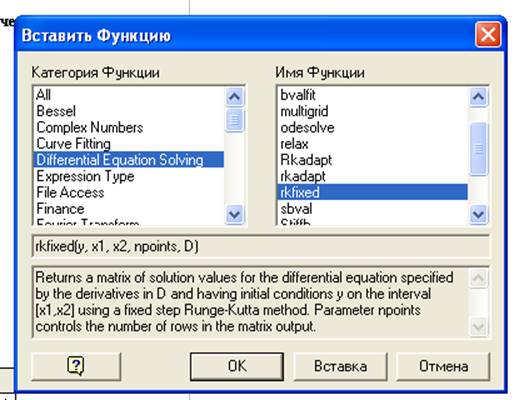
В этой функции последовательно стоят: начальные условия по скорости, граничные условия интегрирования (возьмите как в примере), число шагов интегрирования и правые части уравнений.
3. Результат
получается в виде матрицы значений времени t и составляющих скорости Vх
и Vу . Результат получите путем вырезания соответствующих строк
(столбцов матрицы). Для этого введите операция вырезания в виде ![]() .
.
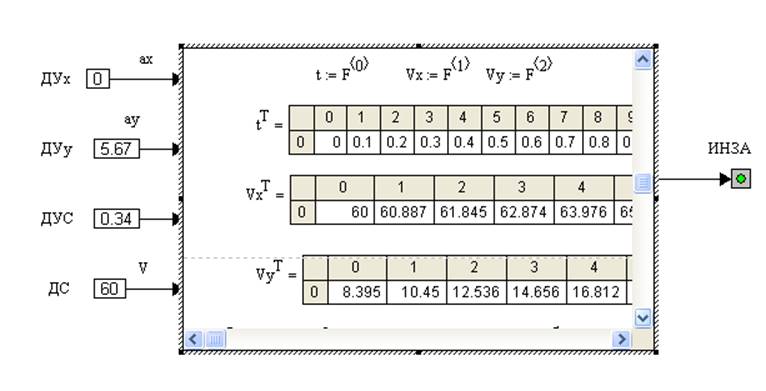
4. Введите в датчики
ранее полученные параметры ![]() ,
,
![]() ,
, ![]() .
Запустите процесс моделирования нажатием кнопки
.
Запустите процесс моделирования нажатием кнопки ![]() .
В противном случае некоторые переменные в формулах будут изображены красным
цветом, т.к. на вход модели не поданы необходимые данные с датчиков, и
результат вы не получите.
.
В противном случае некоторые переменные в формулах будут изображены красным
цветом, т.к. на вход модели не поданы необходимые данные с датчиков, и
результат вы не получите.
5. Результат
окончательно получите в матрицы-строки, введя транспонированные значения ![]() ,
,
![]() ,
,
![]() .
Транспонирование позволяет более компактно разместить результат. Для
транспонирования переменных вызовите палитру Матрица
.
Транспонирование позволяет более компактно разместить результат. Для
транспонирования переменных вызовите палитру Матрица

щелкнув
в палитре Математика пиктограмму ![]() :
:
После
ввода соответствующей переменной нажмите в палитре Матрица символ ![]() .
После набора соответствующих переменных нажмите =. Появится результат (после
ввода данных в датчики и запуска процесса моделирования):
.
После набора соответствующих переменных нажмите =. Появится результат (после
ввода данных в датчики и запуска процесса моделирования):
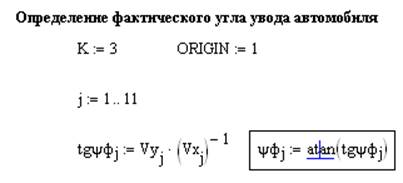
1.4. Определение фактических (текущих значений угла увода автомобиля
1. Создайте цикл расчета фактических значений угла увода автомобиля в виде:
Для
получения результата введите соответствующие переменные в транспонированном
виде: ![]() ,
,
![]() .
Пересчитайте фактический угол из радианной меры в градусную
.
Пересчитайте фактический угол из радианной меры в градусную
![]()
2. Получите результат
в виде 
3. Определите влияние величины скорости автомобиля на повороте на скорость возрастания фактического угла увода автомобиля. Для этого подайте на вход модели следующие значения скорости автомобиля V = 20 км/ч, 40 км/ч, 60 км/ч, 80 км/ч. Получите матрицы-строки со значениями фактического угла увода автомобиля за 10 шагов интегрирования. Сравните полученные результаты и сделайте вывод о влиянии величины скорости автомобиля на повороте на скорость возрастания фактического угла увода автомобиля.
4. Определите влияние
боковой составляющей ускорения автомобиля на повороте на скорость возрастания
фактического угла увода автомобиля. Для этого установите скорость автомобиля V = 60 км/ч, продольную
составляющую ускорения автомобиля ах = 0 м/с2 ;![]() .
Подайте на вход модели следующие значения боковой составляющей ускорения ау
= 4 м/с2, 8 м/с2, 10 м/с2. Получите
матрицы-строки со значениями фактического угла увода автомобиля за 10 шагов
интегрирования. Сравните полученные результаты и сделайте вывод о влиянии
величины боковой составляющей ускорения автомобиля на повороте на скорость
возрастания фактического угла увода автомобиля.
.
Подайте на вход модели следующие значения боковой составляющей ускорения ау
= 4 м/с2, 8 м/с2, 10 м/с2. Получите
матрицы-строки со значениями фактического угла увода автомобиля за 10 шагов
интегрирования. Сравните полученные результаты и сделайте вывод о влиянии
величины боковой составляющей ускорения автомобиля на повороте на скорость
возрастания фактического угла увода автомобиля.
5. Определите влияние угловой скорости автомобиля на скорость возрастания фактического угла увода автомобиля. Для этого установите следующие входные параметры: V = 60 км/ч, ах = 0 м/с2 , ау = 6 м/с2. Подайте на вход модели следующие значения боковой составляющей ускорения ωz = 0,5 1/с; 1 1/с; 1,5 1/с Получите матрицы-строки со значениями фактического угла увода автомобиля за 10 шагов интегрирования. Сравните полученные результаты и сделайте вывод о влиянии величины угловой скорости автомобиля на повороте на скорость возрастания фактического угла увода автомобиля.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.