Эксперимент 1. Исследование влияния различных факторов на интенсивность нарастания фактического угла увода автомобиля
1.1. Создание модели системы при отсутствии алгоритма управления
1. Создайте модель системы управления курсовой устойчивостью автомобиля при отсутствии алгоритма управления (рис.6).
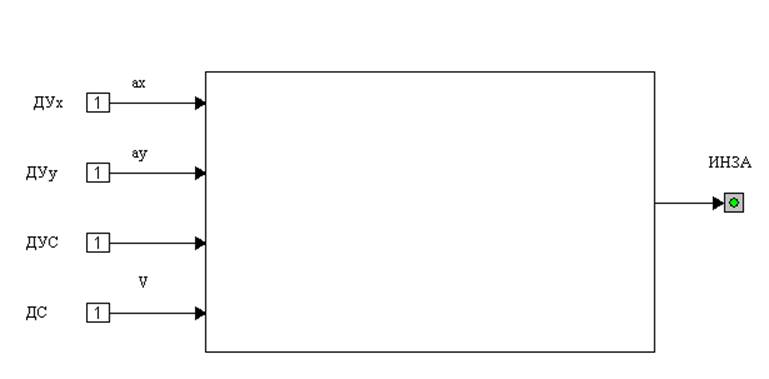
Рисунок 6 Модель системы управления курсовой устойчивостью автомобиля при отсутствии алгоритма управления
Модель включает электронный блок управления (ЭБУ), датчик продольного ускорения автомобиля ах (ДУх), датчик поперечного ускорения автомобиля ау (ДУу), датчик угловой скорости вращения автомобиля ωz (ДУω), индикатор начала заноса автомобиля (ИНЗА), датчик скорости автомобиля (ДС). В качестве ЭБУ используйте Mathcad-объект, обладающий высокой наглядностью моделирования процессов. Для этого в меню Tools (инструменты) выберите список Insert Mathcad Objtct (Вставить Mathcad-объект). В появившемся списке выберите команду New (Новый) – вставка нового Mathcad-объекта (рис.7).
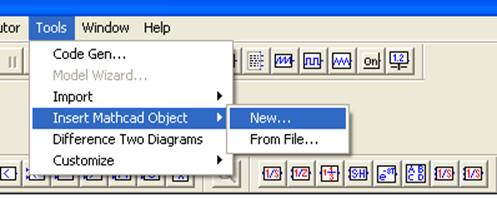
Рисунок 7 Выбор нового Mathcad-объекта
При исполнении команды New запускается система Mathcad, и в окне модели появляется объект системы Mathcad (рис. 8). Он имеет вид прямоугольника с заштрихованной рамкой со входами (слева) и выходами (справа). Строка меню VisSim заменяется строкой меню системы Mathcad и в окне модели появляется плавающая панель выбора палитр математических символов.
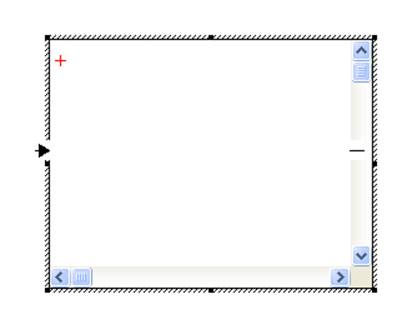
Рисунок 8 Объект Mathcad
2. Установите шрифт Times New Roman Сyr (Кириллица).
![]()
Сделайте в объекте надпись «ЭБУ».
3. Mathcad-объект имеет один
вход и один выход. Увеличьте число входов до 3 по числу датчиков (входных
параметров). Для этого на панели инструментов возьмите стрелку ![]() ,
подведите ее слева от входа (выхода) и щелкните левой кнопкой «мыши».
,
подведите ее слева от входа (выхода) и щелкните левой кнопкой «мыши».
4. Установите
напротив соответствующих входов блоки константы (const) ![]() ,
которые будут играть роль датчиков. Установите метки рядом с датчиками с их
наименованием и метки рядом со входами и выходами с указанием параметров. Не
забывайте при установке меток в их диалоговом окне выставлять в окне «Шрифт» -
Times New Roman, а в окне «Набор символов» - «Кириллический».
,
которые будут играть роль датчиков. Установите метки рядом с датчиками с их
наименованием и метки рядом со входами и выходами с указанием параметров. Не
забывайте при установке меток в их диалоговом окне выставлять в окне «Шрифт» -
Times New Roman, а в окне «Набор символов» - «Кириллический».
Для входа в это окно в основном окне следует нажать кнопку Font.
5. Установите на выходе ЭБУ блок световой индикации light. Его можно найти в меню Blocks, в строке Signal Consumer (рис. 9).
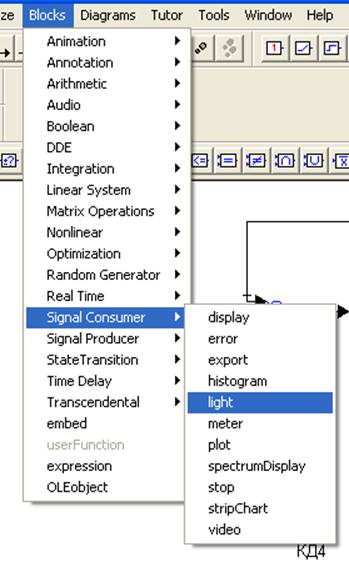
Рисунок 9 Выбор блока световой индикации light
6. Введите в ЭБУ входы модели, присвоив им соответствующие наименования параметров:
· ДУх – ах := in0;
· ДУу – ау := in1;
· ДУС – ωz := in2;
· ДС – V := in3.
Перед вводом параметров установите надпись «Ввод входных параметров».
1.2. Определение теоретического угла увода автомобиля
1. В ЭБУ начните создавать алгоритм управления. В данном случае алгоритм определения теоретического угла увода автомобиля, соответствующего заданному углу поворота управляемых колес. Для этого в Mathcad – объекте сделайте соответствующую надпись «Определение теоретического угла увода автомобиля».
2. Введите расстояние от центра масс автомобиля до задней оси В := 1.5 (не забывайте вместо запятой ставить точку).
3. Введите угол поворота управляемых колес, выраженный в градусах φгр := 20.
4. Введите величину базы автомобиля L := 3 и величину его колеи В1 := 1.8.
5. Пересчитайте угол поворота колес в радианную меру
![]()
6. Определите тангенс
угла поворота управляемых колес. Для этого на панели инструментов нажмите
кнопку стандартных функций («Вставить функцию») ![]() .
В появившемся окне выберите
.
В появившемся окне выберите
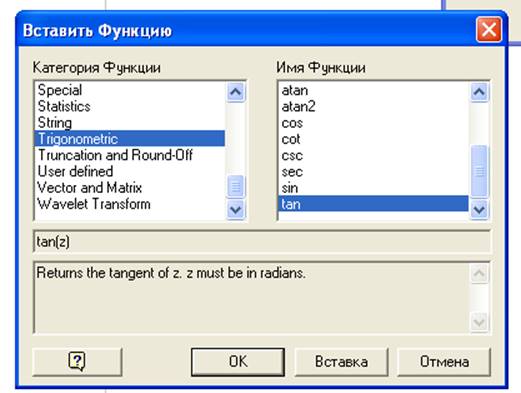
и запишите tan (φ) = (щелкните знак равенства, появится результат.
7. Определите тангенс теоретического угла увода автомобиля
8. Определите теоретический угол увода автомобиля в радианной мере, использовав функцию arctg ( здесь atan)
9. Определите теоретический угол увода автомобиля в градусной мере.
1.3. Определение текущих значений составляющих скорости автомобиля
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.