Во-вторых, по полученным значениям от датчиков скорости колес, датчика рыскания и датчика боковых ускорений определяется фактическое поведение автомобиля, соответствующее фактическим значениям регулируемых переменных. Далее вычисляется и используется разность между номинальными и фактическими значениями переменных величин как набор управляющих сигналов в контроллере системы VDC.
Для реализации задачи управления боковым уводом каждого колеса в отдельности, т. е. при выполнении основной функции системы VDC, необходимо, чтобы тормозное давление на каждом колесе могло модулироваться независимо от водителя и как этого требует заложенная в память ЭБУ – VDC программа управления. Отсюда очевидно важное различие между системами АВS и VDC. Для системы АВS колесо является объектом управления скоростью его вращения, чтобы предотвратить блокировку и сохранить скольжение колеса малым (в пределах допустимой нормы). При этом предотвращается возможность появления и некоторого воздействия поперечной силы. Для системы VDC автомобиль является объектом управления с целью стабилизации движения в критических ситуациях, когда пробуксовкой колес можно и нужно управлять, чтобы получить требуемые поперечные и продольные силы воздействия на движущийся автомобиль.
Вкритической ситуации, когда автомобиль начинает срываться в движение боковым юзом, ширина полосы скольжения между передними и задними колесами больше ширины автомобиля. Это позволяет выбрать каскадную структуру системы управления, в которой внутренний контур управления с обратной связью управляет пробуксовкой колес, а внешний — движением автомобиля. Такая структура системы управления показана на рисунке 4.
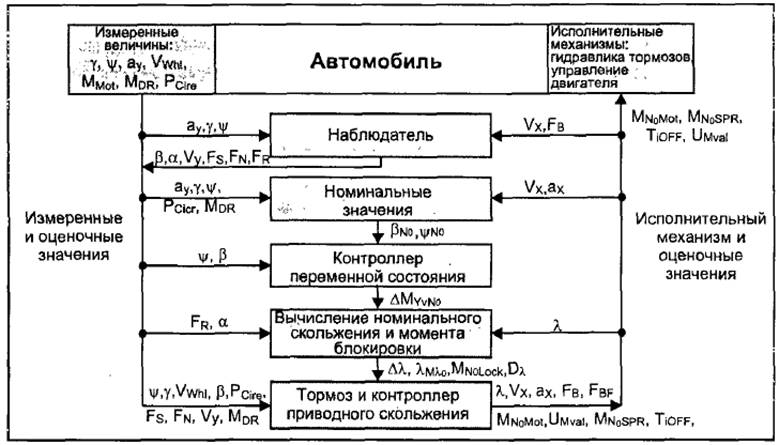
Рисунок 3 Функциональная блок – схема системы VDC
Во внешнем контуре управления с обратной связью происходит коррекция номинальных значений скольжения колес под требуемое для нештатных условий движения. При этом контроллер скольжения получает сигналы управления от контроллера динамики автомобиля в виде' разностных величин между номинальными и фактическими параметрами движения, а также от датчиков автомобиля. Во внутреннем контуре формируются сигналы управления для исполнительных механизмов, с помощью которых корректируется боковой увод колес до номинальных значений скольжения. Наблюдатель используется для того, чтобы оценить фактическое значение угла бокового увода автомобиля и других неиз-меряемых величин, например, сил воздействия на колеса, направленных по нормали. Как и в системе АВS, алгоритм управления запрограммирован и хранится в ПЗУ – VDC. Когда система VDC активирована, контроллер скольжения реализует выборку данных из памяти, сравнивает их с текущими значениями, вырабатывает корректирующие сигналы и передает их на исполнительные устройства.
Система управления двигателем реализована как внутренний контур управления с обратной связью. Номинальные значения сигналов, передающиеся к системе управления двигателем по шине САN -интерфейса, определяют пределы регулирования крутящего момента.
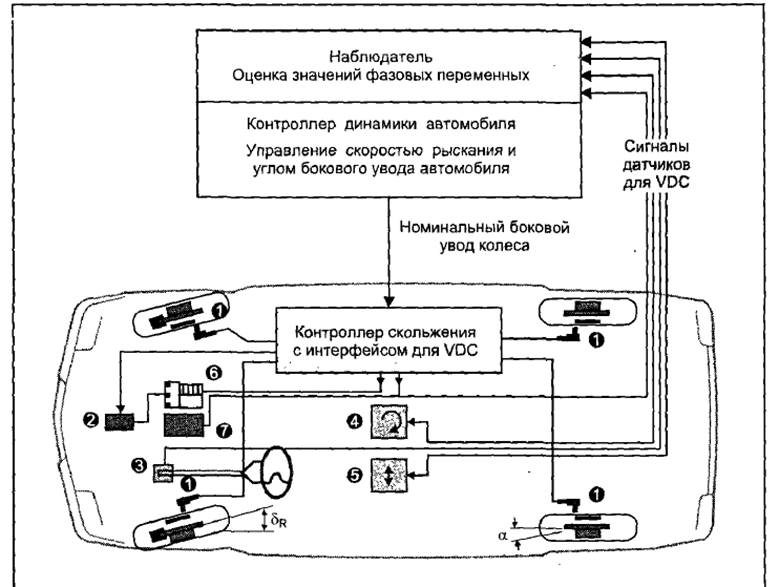
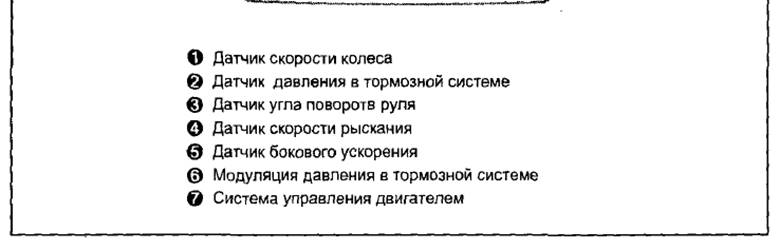
Рисунок 4 Каскадная структура системы VDC с двумя контурами обратной связи
Формирование алгоритма работы системы VDC
Для обеспечения работы системы управления курсовой устойчивостью необходимо знать текущую скорость автомобиля, составляющие которой Vх, Vу будем определять путем интегрирования дифференциальных уравнений:
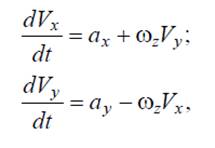
где ах, ау– составляющие ускорения центра масс автомобиля; ωz– угловая скорость автомобиля относительно вертикальной оси, проходящей через центр масс.
Кроме того,
необходимо текущее значение тангенса угла ![]() между
вектором скорости и продольной осью автомобиля, а также теоретическое значение
тангенса этого угла
между
вектором скорости и продольной осью автомобиля, а также теоретическое значение
тангенса этого угла ![]() .
Курсовая устойчивость автомобиля будет обеспечиваться при равенстве этих углов,
а значит, и их тангенсов.
.
Курсовая устойчивость автомобиля будет обеспечиваться при равенстве этих углов,
а значит, и их тангенсов.
Значения ![]() и
и
![]() определяются
выражениями:
определяются
выражениями:

где l1п– расстояние от центра масс корпуса автомобиля до задней оси; хр
– координата смещения полюса поворота относительно задней оси автомобиля; ![]() – база автомобиля;
– база автомобиля;
![]() –
угол поворота задающего (внутреннего переднего) управляемого колеса; В – колея
автомобиля.
–
угол поворота задающего (внутреннего переднего) управляемого колеса; В – колея
автомобиля.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.