


Лекция 1
Автоматизация – комплексы технических мероприятий, обеспечивающих частичное или полное исключение человека.
Управление каким-либо объектом – процесс воздействия на него с целью обеспечения требуемого течения процесса в объекте или требуемого изменения состояния объекта.
Основой управления является получение и обработка информации о состоянии и внешних условиях работы объекта для определения воздействий, которые необходимо приложить к объекту, чтобы обеспечить достижение цели управления.
Цель управления – состояние САУ, которое соответствует моменту, когда отсутствует обмен информационной энергией между объектом управления и управляющим устройством при наличии связи между ними.
Взаимодействие управляющего устройства и объекта управления осуществляется в соответствии с избранным алгоритмом управления.
Алгоритм управления – совокупность правил и предписаний, в соответствии с которыми управляющее устройство вырабатывает сигналы управления для объекта управления с целью достижения цели управления.
 |
В процессе управления состояние систем изменяются.
Параметры системы, которые характеризуют состояние процесса в системе, называют координатами процесса.
Системы управления и процессы в них являются многоплановыми и многоаспектными.
Для того, чтобы начать процесс управления необходимо выполнить операцию запуска системы или включения;
В процессе управления выполняются переходы из одного режима работы системы в другой, т.е. операция переключения.
По получению результата процесс необходимо остановить, т.е. выполнить операцию выключения.
Режим включения, переключения и выключения не является предметом изучения ТАУ.
В процессе управления координаты процесса должны находиться в заданных границах. При выходе за границы процесс управления нарушается и результатом может оказаться поломка системы или брак технологического процесса.
Задача удержания параметров системы в заданных границах является задачей ТАУ.
![]()
![]()
![]()
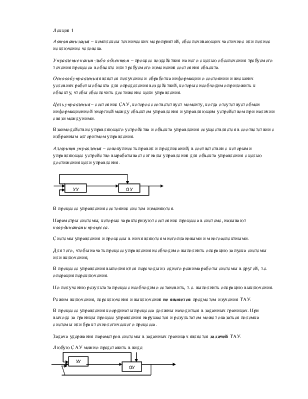
![]() Любую САУ можно представить в
виде:
Любую САУ можно представить в
виде:

Состояние объекта характеризуется выходной величиной у. в общем случае выходных величин может быть несколько; тогда у является вектором, координаты которого определяют выходные величины.
Помеха F препятствует управлению, т.е. изменяет состояние объекта управления.
На выход управляющего устройства подается задающее воздействие х, которое содержит информацию о значении у и его допустимых отклонениях, т.е. информацию о цели управления.
Управляющее устройство перерабатывает информацию по заложенному в него алгоритму управления, в результате получаем управляющие воздействие.
Классификация САУ
|
|||||||
|
|
||||||
|
|
|||||||||||
 |
||||||||||||
|
||||||||||||
|
|
|||||||||||
|
|
|
||||||||||
В зависимости от видов используемой информации, различают разомкнутую систему и замкнутую систему.
В разомкнутых системах выходная величина не измеряется, т.е. нет контроля за состоянием объекта.
Разомкнутыми эти системы называют потому что в них отсутствует обратная связь между выходом обхекта и входом управляющего устройства.
Возможны такие разомкнутые системы, в которых управляющее устройство измеряет только задающее воздействие или только возмущение, или оба эти сигнала одновременно.
Точность между входным и выходным сигналами целиком определяется постоянством параметров и возмущения и никак не контролируется следовательно такие системы периодичны лишь при достаточно высокой стабильность условий работы системы и невысоких требований точности.
Вторым вариантом разомкнутой системы является САУ по возмущению. Такие системы применяются когда задача сводится к поддержанию постоянства выходной величины.
Наиболее полным видом разомкнутой системы является система управления по задающему и возмущающему воздействию, т.е. управление осуществляется функцией 2х величин: x и z. Возможность компенсации возмущающего воздействия позволяет повысить точность управления в разомкнутых системах, но точность таких систем все же невелика, т.к. невозможно компенсировать все возмущения, действующие на систему.
Разомкнутые системы нашли применение только при невысоких требованиях точности управления.
![]() Организация
разомкнутой системы.
Организация
разомкнутой системы.
 |
З – задача;
Xз – задающий сигнал;
ВУ – вычислительное устройство.
Особенностью такой структуры является то, что воздействие с одного узла на другой передается последовательно без ветвления.
Точность управления таких систем невелика, но из-за простого технического исполнения они нашли широкое применение.
По отношению к внешним устройствам вся система в целом может рассматриваться как 1 элемент задачи.
В замкнутых системах на вход управляющего устройства подается входная и выходная величина. Исходя из входной величины управляющее устройство определяет значение выходной величины и обеспечивает необходимое соответствие между этими величинами путем воздействия на объект.
В такой системе управляющее устройство стремиться ликвидировать все отклонения выходной величины от значения, определяемого задание входной величины, включая любые изменения параметров системы и возмущения.
Системы такого типа представляют собой замкнутый контур и называются системами с обратной связью.
Схема замкнутой системы.
 |
Δх=хз-хвых
ЭС – элемент сравнения.
На объект управления одновременно могут действовать несколько возмущающих факторов:
Давление;
Температура;
Влажность;
Наличие электрических и магнитных полей.
Для компенсации возмущающих воздействий, т.е. для точного управления в систему включают столько устройств компенсации возмущения, сколько на нее действует возмущающих факторов.
Система в этом случае получается сложной и массивной.
Задача решается проще на основе принципа обратной связи.
Для этого сигнал с выхода системы подают на вход по цепям обратной связи. Выходная координата хвых сравнивается с заданной хз и формируется отклонение Δх, которое и становится управляющим воздействием.
Наибольшее распространение получили системы с компенсацией возмущения. Это те системы, в которых при возрастании возмущения выходная координата отклоняется от заданной величины до значения когда работоспособность системы уменьшается.
|
|
 |
|||||
ДЗ – датчик, измеряющий возмущение.
U2(t) формируется таким образом, чтобы скомпенсировать влияние возмущения.
На объект управления могут действовать несколько возмущений. Выбирается то возмущение, которое оказывает наиболее существенное влияние на работу системы и выполняется компенсация именно этого фактора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.