Приравнивая вещественные и мнимые части, получим
 (4.3.4)
(4.3.4)
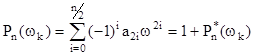
Если an=1, то
Разрешим уравнение (4.4.4) относительно Uk и Vk :
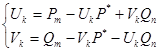 (4.3.5)
(4.3.5)
Введем обозначения :
U=[U1,U2,...,Un]T , V=[V1,V2,...,Vn]T;
T1=diagU; T2=diagV;
![]() ; a=
; a=![]()
![]() ; a=
; a=![]()
![]() ; b=
; b=![]()
![]() ; b=
; b=![]()
Система (4.3.5) записывается в векторно-матричной форме в следующем виде:
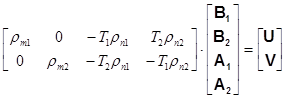 , (4.3.6)
, (4.3.6)
где A1=[a0,a2,...,an1]T,
A2=[a1,a3,...,an2]T ,
B1=[b0,b2,...,bm1]T ,
B2=[b1,b3,...,bm2]T .
Система (4.3.6) может быть переписана в виде
D×x = C ,
где D, x, C- матрицы соответствующих размеров. Решение системы имеет вид
![]() = D+C, или
= D+C, или
![]() =(DT×D)-1DTC , при
соответствующих размерах матриц, где D+ - псевдообратная в смысле Мура- матрица;
характеризуется следующими определяющими свойствами
=(DT×D)-1DTC , при
соответствующих размерах матриц, где D+ - псевдообратная в смысле Мура- матрица;
характеризуется следующими определяющими свойствами
НН+Н=Н, Н+НН+=Н+.
Существует модификация метода:
Вводится невязка
![]() (4.3.7)
(4.3.7)
Задача идентификации сводится к минимизации
величины ![]() . Умножим (4.3.7) на A(wk):
. Умножим (4.3.7) на A(wk):
A(wk)e(wk) = A(wk)W(jwk)-B(wk) (4.3.8)
Представим равенство (4.3.8) в алгебраической форме:
A(wk)e(wk)=P(wk)+jQ(wk)ÞçA(wk)e(wk)ï2 = P2(wk)+Q2(wk)
Новая функция ошибок:
![]()
Имеем
B(wk) = a + jwb ; A(wk) = s + jwt ;
P(wk) = Re{A(wk)W(jwk)-B(wk)}= Re{[sk + jwktk](U(wk)+jV(wk))-(ak+jwkbk)}= skUk - wktkVk - ak ;
Аналогично
Q(wk) = Im{...}= wktkUk + skVk - wkbk
Таким образом имеем :
J=![]() (4.3.9)
(4.3.9)
ak= b0
- b2![]() + b4
+ b4![]() - ...
- ...
bi = b1
- b3![]() + b5
+ b5![]() - ...
- ...
si = 1 - a2![]() + a4
+ a4![]() - ...
- ...
ti = a1 - a3![]() +
a5
+
a5![]() -...
-...
Приравнивая градиент J к нулю, получим линейную систему алгебраических уравнений относительно неизвестных параметров:
![]() , где x = [b0,b1,...,bn,a1,a2,...,an] вектор параметров системы,
, где x = [b0,b1,...,bn,a1,a2,...,an] вектор параметров системы,
![]() - символ градиента.
- символ градиента.
Решение этой системы приводит к окончательному результату.
Недостаток метода заключается в том, что должен быть заранее известен порядок уравнений системы.
Рассмотрим частные случаи, отвечающие простейшим звеньям первого и второго порядков.
1. Система первого порядка:
![]() ;
;
Полагая
S = jw,
получим
![]() = g + jb .
= g + jb .
Откуда следует равенство
![]() (4.3.10)
(4.3.10)
Приравнивая левые и правые части равенства(4.3.10), получим систему уравнений:

откуда
![]() ,
, ![]() ;
;
Измерения A(w1) и Q(w1) дает g(w1) = g1и b(w1) = b1, откуда производят вычисление {a0 ,a1}
По значениям a0 и a1 определяются параметры исходной системы
![]()
и
![]() .
.
Можно рассмотреть вариант измерения амплитуд в точках w1 и w2:
Решив систему получим:
 ;
;
 .
.
2. Система второго порядка:
![]() ;
;
Для каждой частоты wi можно определить два параметра, поэтому система уравнений доопределяется введением последовательно звена 1-го порядка:
![]()
Таким образом
![]() , где с0 = a3T , c1 = a1T + a0
, c2 = a2T + a1 , c3= a2
.
, где с0 = a3T , c1 = a1T + a0
, c2 = a2T + a1 , c3= a2
.
Система уравнений примет вид:
откуда
|
полагая ![]() и
и ![]() получим
получим
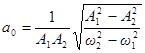
![]() ,
,
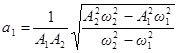
![]() ,
,
![]() ,
,
![]() , где
, где ![]() - главный определитель линейной системы.
- главный определитель линейной системы.
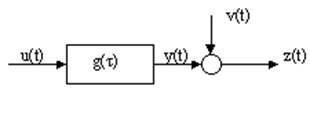
4.4. Корреляционный метод идентификации линейных систем
|
рис.4.4.1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.