u(t)»u(kT) ,
при
kT £ t £ (k+1)T
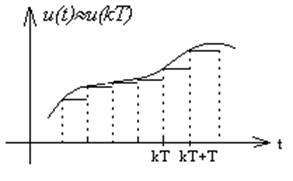
Рис. 4.2.1
Весовая функция принимается равной значению в середине интервала квантования (рис. 4.2.2).
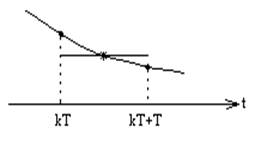
Рис.4.2.2
![]() ,
,
k T£ t < (k+1)T
Интеграл (4.2.1) после принятых аппроксимаций примет вид:
![]() (4.2.2), где к=0,1,…
(4.2.2), где к=0,1,…
Вводим в рассмотрение вектор наблюдений:
y(T) = [y(T),y(2T),...,y(kT)]T
- размером (кx1) и вектор весовой функции в точках квантования
![]()
- размером (кx1);
Положим в выражении (4.2.2) k = 0,1,2,... ,тогда последовательно будем иметь
![]() ;
;
![]() ;
(4.2.3)
;
(4.2.3)
![]() ;
;
........................................................................................
![]()
Образуем матрицу входа:
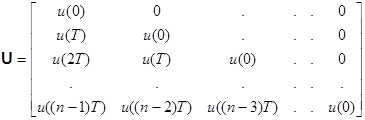 - матрица размером n´n
- матрица размером n´n
Тогда основное уравнение вход-выход (4.2.2) можно записать в следующем виде :
![]() ,
(4.2.4)
,
(4.2.4)
где êUê=[u(0)]n¹0, поэтому U-1 существует.
Из выражения (4.2.3) получим :
![]() ,
(4.2.5)
,
(4.2.5)
где ![]() =TU
=TU
Выражение (4.2.5) благодаря виду матрицы U можно переписать в рекуррентной форме :
![]() , (4.2.6)
, (4.2.6)
где ![]() и
и ![]()
Действительно из уравнений (4.2.3) имеем:
|
Далее ,
![]()
и т.д.
В выражении (4.2.5) с ростом “k” растет объем вычислений, при этом для определения g(nT) нужно 2n умножений и сложений.
Для обеспечения адаптивной идентификации требуется высокое быстродействие. Этот недостаток является основным. Преимуществом данного подхода является возможность работы при пробных сигналах и на любых реализациях в режиме нормального функционирования.
Частный случай:
Если на входе системы единичное ступенчатое воздействие
U(iT)=1(iT),
то выражение (4.2.6) примет вид :
![]() (4.2.7)
(4.2.7)
Определив ![]() имеем:
имеем:
![]() , где Qk = Qk-1 + gk-1
, где Qk = Qk-1 + gk-1
Основные осложнения в обсуждаемом методе связаны с наличием помехи в измерении выхода. Главные пути преодоления трудности – воспроизведение, если возможно, одинаковых реализаций на входе с последующим усреднением результатов, и применение процедуры усечения весовой функции полагается:
g(nT)=0,
при n>k, и организуется продолжение наблюдений при n>k. Матрица входов U – (kxk) увеличивает количество строк, сохраняя количество столбцов. Начиная с “k+1” шага можно применять рекуррентный алгоритм метода наименьших квадратов (см. раздел 6.2).
4.3 Оценка параметров систем по частотным характеристикам.
Пусть W(S)- передаточная функция неизвестной системы
![]()
![]() ; (4.3.1)
; (4.3.1)
Тогда
W(jw)=çA (w)ïjQ(w)=U(w)+jV(w)
- частотная характеристика системы, или
![]() ;
;
Если
“m” и “n” известны и ![]() -
оценка частотной характеристики в том же виде (4.3.1), то задача заключается в минимизации величины.
-
оценка частотной характеристики в том же виде (4.3.1), то задача заключается в минимизации величины.
e(wk) = W(jwk) -![]() ,k=1,n.
,k=1,n.
где W(jwk) = Uk + jVk - экспериментальные данные измерений в частотах wk (k=1,n);
Представим
![]()
- значения оценки частотной характеристики в той же серии точек, или
![]() (4.3.2)
(4.3.2)
Из выражения (4.3.2) полагая
![]() , к=(1,n)
, к=(1,n)
имеем:
![]() ,
(4.3.3) откуда
,
(4.3.3) откуда
Pm + jQm = (Uk + jVk)(Pn + jQn) = UkPn + VkQn + j(VkPn + UkQn)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.