Передаточная функция Wд(S)=Tд*S
Данные регуляторы в динамическом отношении являются дифференцирующим звеном, они отдельно для регулирования не применяются, так как не реагируют на постоянное отклонение регулируемой величины. Дифференциальные регуляторы (Д-регуляторы) обычно входят в состав ПД-регуляторов или являются частью пропорционально-интегрально-дифференциальных регуляторов (ПИД). Закон регулирования передаточной функции ПД-регуляторов описываются уравнениями:
Рвых=Кп*Рвх+ТдdPвх/dt
WПД(S)=Кп+ТДS (14)
Для ПИД-регулятора они имеют вид:
Рвых=КрРвх+(1/Tu)*интеграл(Рвхdt+TДdPвх/dt) (15)
WПИД(S)= TДS+Kp*(1/TuS)=(TдTuS2+Kp/TuS+1)/TuS (16)
Скачкообразное изменение регулируемого сигнал вызывает в начальный момент времени воздействие на регулирующий орган. После его под действием части регулятора это воздействие уменьшается. В регуляторе с диф. частью включаются диф. звенья. Например для получения ДИП необходимо в схему 13 включить на входе сумматора 1, цепь 5, дифференциатор изображённый на рисунке 10б. Все рассмотренные регуляторы могут строиться на мембранных, сильфонных, струйных элементах.
Линейные пульсирующие сопротивления и их использование в приборах непрерывного действия.
Линейное пульс. сопротивление позволяет получить линейную зависимость расхода в широком диапазоне перепада давления , что не обеспечивается обычными пневмо сопротивлениями. В ряде приборов оформляется конструктивно как самостоятельный элемент. Такой пульсирующий дроссель построен на узле памяти и представляет собой пульсацию изменения сопротивления.
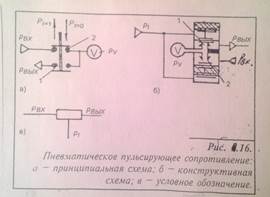
Запоминает количество воздуха в замкнутом объёме и преобразует давление в прерывистый расход. Для постоянства величины ёмкости объём V должен быть замкнутым. Но при осуществлении операций он должен сообщаться с входными и выходными линиями. Работа сопротивлений как бы прерывиста, чередуются операции вычисление и сообщения с подводящими линиями. Величины P, V, m ,T связаны уравнением состояния газа. PV=mRT (1).
При T=const и V=const масса газа зависит от величины давления Р. Если управляющий сигнал Рt=0, то контакт 2 замкнут, а контакт 1 разомкнут. Это соотв. открытому клапану 2 и закрытому клапану 1 рисунок 16б. В этом случае масса газа в ёмкости m1=ро1*V=РвV/RT. Когда подача управляющего сигнала осуществлена Pt=1 открывается клапан 1 и закрывается клапан 2.
m2=ро2*V=РвыхV/RT (3)
За один период действия синхронизирующего сигнала проходит из входа на выход количество воздуха дельта(m)=(V/RT)(Pвх-Рвых) (4)
За n периодов масса m=(V*n/RT) (Pвх-Рвых) или dm/dt=(V/RT)(dn/dt) (Pвх-Рвых)=(V/RT)f*(Pвх-Рвых), где f=dn/dt – частота замыкания контактов 1 и 2.
Если частота остаётся потёсанной то dm/dt=(V/RT)f*(Pвх-Рвых)=К*дельта(Р) (5)
где К проводимость сопротивления
Как следует из уравнения 5 пульсирующее сопротивление линейно при любых давлениях Рвх и Рвых. Пульсирующее сопротивление может работать как с требуемым приближением непрерывно. При высоких значениях f погрешность составляет +-0.5%. Проводимость сопротивления К прямо пропорционально частоте f и ёмкости V, что позволяет изменять проводимость. Пул. сопр. могут быть использованы в разных вычислительных приборах, например на этих приборах строятся МДУ прямого или косвенного действия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.