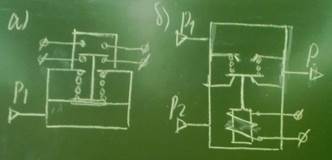
Схема элемента «и» пассивное, так как 1 на выходе формируется за счёт входного сигнала Р2. У реле предназначенного для выполнения операции дизъюнкция т.е. «или» Р=Р1*Р2, схема 4 выходной сигнал будет равен 1 тогда когда один из входных сигналов будут равен 1. Р=Р1+Р2.
При выполнении операции импликация или «если, то» схема 5, на выходе появляется 0 если Р=1, а Р2=0. Р=Р1->P2=P1(инверсия)+Р2.
Схема логического элемента «запрет» Р=Р2<-P1=P1(инверсия)Р2. Сигнал равен 1 если Р1=0 а Р2=1, в остальных случаях на выходе 0.
Дизъюнкцию двух элементов можно выполнить при помощи пассивного элемента (сдвоенного шарикового клапана). С помощью пневмореле и шарикового элемента «или» можно реализовать любые логические функции. For instance функция «стрелка Пирса» характеризуется тем что она обращается в 1 тогда и только тогда когда оба аргумента равны 0: Р=(Р1+Р2)инверсия. Схема реализации показана на схеме 7. Схема двухходового логического элемента Шлифтшефера собирается из 2 пневматических реле, схема 8: Р1/P2=(P1P2)инверсия, то Р=1 если один из сигналов =0 а другой =1.
На схеме 9 представлен элемент «равнозначность». Для этого элемента справедливо равенство Р=Р1=Р2=(Р1+Р2)->Р1Р2=(Р1Р2)инверсия+Р2Р1
Логическая функция
сложения представляет собой отрицание равнозначности. Р=(Р1![]() Р2)=(Р2<-Р1)+(Р1<-Р2)=Р2Р1-+Р1Р2-.
Логические элементы в таблице 2 образуют комплект для реализации 2х независимых
переменных.
Р2)=(Р2<-Р1)+(Р1<-Р2)=Р2Р1-+Р1Р2-.
Логические элементы в таблице 2 образуют комплект для реализации 2х независимых
переменных.
Вспомогательные элементы УСЭПА
К группе вспомогательных элементов относятся органы управления, преобразователи, элементы исполнительных органов. Органами управления УСЭПА являются пневмокнопки, пневмотумблеры. Задатчики формируют сигналы определённого уровня. Они бываю 3 типов:
1) дроссельные
2) мембранные
3) шариковые
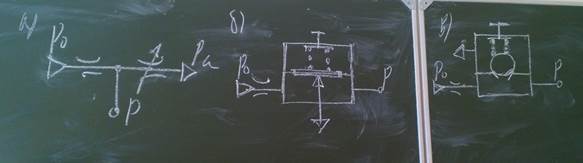
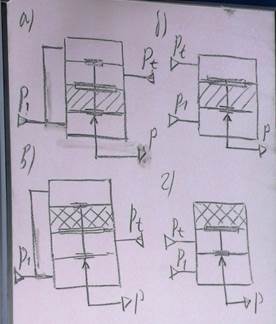
Рисунок 2 а представляет собой камеру с постоянным сопротивлением на входе и регулируемым на выходе. Уровень выходного сигнала Р определяется соотношением проводимости дросселей и зависит от настройки регулируемого дросселя имеющего выход в атмосферу. Мембранный задатчик рисунок 2б состоит из 2 камер разделённых гибкой мембранной жёсткий центр которой служит заслонкой выпускного сопла имеющего выход в атмосферу. Задатчик имеет также проточную камеру на входе которой установлен потёсанный дроссель, выход из неё осуществляется через управляемой дроссель сопло-заслонка. С увеличением натяжения пружины заслонка приближается к соплу, что приводит к повышению сопротивления управляемого дросселя и следовательно к росту давления в проточной камере и на входе задатчика. Работает задатик по принципу компенсации усилий и равновесие мембраны наступает только тогда когда усилие сжатого воздуха действующего со стороны проточной камеры уравновесит усилие натяжения пружины. Т.о. проточная камера является следящей, поэтом уже принципу работает и шариковый задатчик, в отличие от мембранного задатчика, здесь шариковый элемент. Как и в рассмотренном случае давления Р выходное зависит от соотношения сопротивлений постоянного дросселя и регулируемого дросселя. Все эти задатчики имеют малую выходную мощность и применяются внутри схем в частности для подачи питания в глухие камеры. Погрешность таких задатчиков не превышает +-0.5%. Чтобы получить мощные сигналы использую датчики типа П2ЗД.4. устанавливающие любой сигнал от 0.02 до 0.1 МПа.
Пневмокнопки и пневотумблеры (рисунок 3) предназначены для ручной подачи командных сигналов и выполняются 2х видов: разомкнутые и замкнутые.
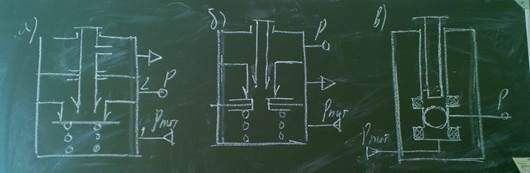
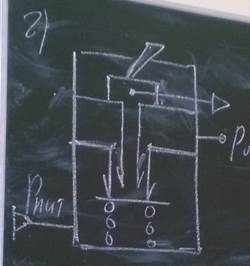
Разомкнутая пневмокнопка (рисунок а) кратковременно подаёт давление питания в схему после кнопки. Давление питание подведено через штуцер 1 в камеру закрытой пневмоконтактом типа сопло-заслонка. В нормальном состоянии линия выхода 2 сообщается с атмосферой и на выходе кнопки давление =0. Нормально замкнутые кнопки (рисунок б и в) в свободном состоянии дают а выходе давление Р=Рпит, а при нажатой кнопке –Ратм. Принцип действия аналогичен нормально разомкнутой пневмо кнопке (рисунок а).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.