 |
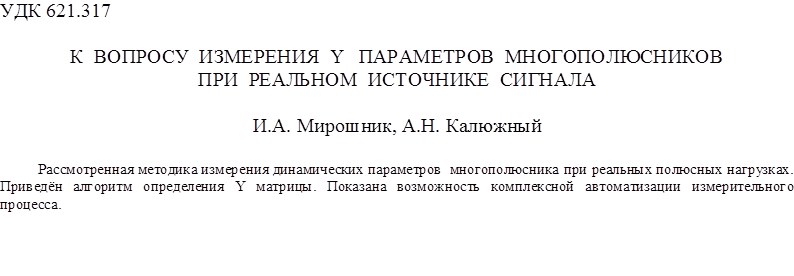
Согласно способу [1.2] для расчёта Y-параметров многополюсника необходимо выполнить измерения элементов Uoji матрицы Uo полюсных напряжений холостого хода по схеме рис.1,а, элементов Úoi вектора Uk калибровочных напряжений по схеме рис.1,б, и элементов Úji матрицы U напряжений нагруженного режима по схеме рис.1,в.
Параметры схем, представленных на рис.1 имеют следующие значения Zгi-внутренние сопротивление источника сигнала Éi; Yo-матрица измерительной схемы, выражающая паразитные индуктивности и ёмкости этой схемы; Y-матрица проводимости многополюсника; Zi-нагрузочное сопротивление активного полюса, моделирующее внутренние сопротивление источника Éi, чтобы осуществить измерения по способу [1,2]; Zj-нагрузка (j>i) полюсов; Zoj-сопротивление образцовой меры для полюса i..
Искажения информации заключаются в том, что вместо сопротивления Zi-в цепи источника Éi, последовательно [1]включены сопротивления Zгi и Zi. При условии
Zгi<< Zi , (1)
эти искажения не существенны.
Тогда матрица У проводимости можно рассчитывать по формуле
Y=2(К-1-Ко-1), (2)
где К-матрица передачи нагруженного режима с элементами Кji;
Ко- матрица передачи холостого хода с элементами Коji;
При сопротивлении входной цепи измерительного прибора Zр=0 коэффициенты Кji и Коji рассчитываются по формулам:
Кji=2ÚijКjZoi/Úoii; (3)
Коji=2ÚоijКjZoi/Úoii; (4)
где Zoi- прямое сопротивление образцов меры;
Кj- коэффициент, определяемый по формуле
Кi=Úoii /Úoi-1. (5)
При учёте шунтирующего влияния входного сопротивления Zр измерительного прибора коэффициенты матрицы К и Ко рассчитываются по формулам [1,2]
Кji=2ÚijКjZoi/[Úoii(1-ÚjjZojKj/ÚojjZр)]; (6)
Коji=2ÚоijКjZoi/[Úoii(1-ZojKj/Zр)]; (7)
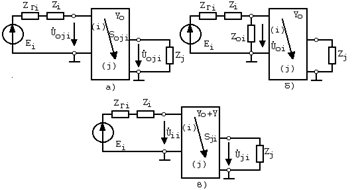 |
Рис.1. Измерительная схема с реальным источником сигнала. а-режим холостого хода; б-режим калибровки; в-нагруженный режим
Если условие (1) нарушается то расчёты по формулам (3)- (7) приведут к погрешности определения матрицы К и Ко. Эти погрешности связаны с нарушением принципа измерения, согласно которому при подключении источника сигнала к активному полюсу внутренние сопротивление этого источника должно быть равным нагрузочному сопротивлению этого полюса.
Рассмотрим способ корректировки выражений (3)-(7), который устраняет погрешности вносимые сопротивлением Zгi. Показано, что информация полученная при измерении матриц U и Uо и вектора Uк согласно [1,2] достаточна для корректировки матриц К и Ко.
Искажения информации проявляется в том, что из-за влияния сопротивления Zгi напряжение Úoii, Úii, Úoi, меньшим, чем при выполнении условия (1). Поэтому отклонения при i=j напряжения в формулах (3)-(7) искажаются, что приводит к искажению диагональных коэффициентов матрицы К и Ко. При расчёте недиагональных коэффициентов i<>j отношения напряжений Úoji/Úoii и Úji/Úoii можно не корректировать, так же как отношения выражают коэффициент передачи по напряжению от полюса i к полюсу j, который не зависит от конкретного значения напряжения поступающего на полюс i.
Для корректировки формул (3)-(7) предлагается определить напряжение Úoii и Úoi которые должны соответствовать напряжениям на полюсах i при выполнении условия (1).
Представим эквивалентные схемы генераторной части измерительной цепи в виде рис.2, где Zoii-входное сопротивление измерительной схемы в режиме холостого хода а Zii входное сопротивление измеряемого многополюсника.
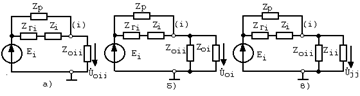 |
Рис.2. Эквивалентные схемы генераторной части измерительного устройства: а-режим холостого хода; б-режим калибровки; в-нагруженный режим.
Представим схему рис.2,а,б в виде рис.3 преобразовав её согласно теореме об эквивалентном генераторе
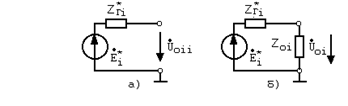 |
Рис.3. Преобразование эквивалентом схемы: а-в режиме холостого хода; б-в режиме калибровки.
В схемах рис.3 сопротивление Zгi*-внутренние сопротивление источника Éi*=Úoii, которое рассчитывается по формуле
Zгi*=( Zoii Zр(Zгi+Zi))/(( Zгi+Zi )Zр- Zoii (Zп +Zгi+Zi)) (8)
Из (8) определяем Zoii по формуле
Zoii= (Zгi*Zр(Zгi+Zi))/ (( Zгi+Zi )Zр- Zгi* (Zр +Zгi+Zi)) (9)
Калибровку сопротивления Zгi, Zi можно выполнять с помощью устройств [4], путём реализации измерительных операций показанных на рис.4.
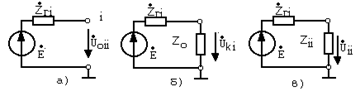 |
Рис.4. Измерение полного сопротивления двухполюсника: а-режим холостого хода; б-режим калибровки; в-нагруженный режим.
Определение сопротивления Z производится по формуле
Zii=Zoi(Úoii/Úoi-1)/ (Úoii/Úii-1). (10)
Для определения внутреннего сопротивления генератора, его эквивалентную схему представляют в виде рис.5, исключая
 |
Рис.5 Эквивалентная схема с учётом влияния измерительного прибора.
Тогда, выполнив измерительные операции согласно рис.4, сопротивление Zгi можно определить по формуле
Zгi=(ZoZр(Uoii/Uoi-1))/ (Zр-Zoi(Uoii/Uoi-1)). (11)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.