3) ![]() или
или ![]() (неравенство Коши
Буняковского);
(неравенство Коши
Буняковского);
4) ![]() (неравенство треугольника).
(неравенство треугольника).
Доказательство. 1. Следует из определения скалярного произведения в евклидовом пространстве.
2. ![]() .
.
3. Если a = 0, то имеем![]() . Пусть a ¹ 0. По
определению евклидова пространства, для любого числа l имеем
. Пусть a ¹ 0. По
определению евклидова пространства, для любого числа l имеем ![]() . Тогда для любого l Î R значение квадратного трехчлена
. Тогда для любого l Î R значение квадратного трехчлена![]() . Так как a2 > 0, то тогда дискриминант
. Так как a2 > 0, то тогда дискриминант ![]() .
Отсюда получаем
.
Отсюда получаем![]() .
.
4. 4. Так как
|a + b|2 = (a + b)2 = (a + b)×(a + b) = a2 + 2(ab) + b2 = |a|2 + |b|2 + 2(ab) =
= (|a|+ |b|)2 - 2|a||b| + 2(ab) = (|a|+ |b|)2 - 2(|a||b| -ab), то по неравенству Коши-Буняковского |a + b|2 £ (|a|+ |b|)2. Отсюда |a + b| £ £ |a| + |b|.
3. Матрица Грама скалярного произведения и ее свойства.
Определение 1. Пусть dim E = n. Матрицей Грама скалярного произведения системы векторов a1, a2, ..., an из E называется определитель
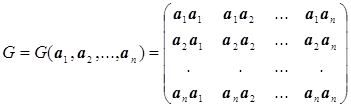 .
.
Определитель матрицы Грама называется определителем Грама.
Пусть система векторов a1, a2, ..., an линейно выражается через систему векторов b1, b2, ..., bn
![]() .
.
Тогда
![]() , по определению произведения двух матриц получаем
, по определению произведения двух матриц получаем
![]() .
.![]()
Если через T=![]() обозначим матрицу перехода от
первой системы векторов ко второй, то получаем формулу
обозначим матрицу перехода от
первой системы векторов ко второй, то получаем формулу
G = Tt G' T , (1)
где G и G' определители Грама систем векторов a1, a2, ..., an и b1, b2, ..., bn соответственно.
Теорема 1.При перестановке векторов определитель Грама не меняется.
Доказательство. При перестановке двух векторов в системе a1, a2 , ..., ak в определителе Грама переставляются сразу две строки и два столбца и при этом абсолютная величина и знак определителя сохраняются. Так как любую перестановку свекторов можно свести к последовательному выполнению перестановок пар векторов, то при перестановке векторов определитель Грама не меняется.
Теорема 2. Система векторов линейно зависима тогда и только тогда, когда ее определитель Грама равен нулю. Если система векторов линейно независима, то ее определитель Грама больше нуля.
Доказательство. Если векторы линейно зависимы, то хотя бы один из векторов a1, a2 , ..., ak линейная комбинация остальных векторов системы
![]() .
.
Тогда
![]()
и одна из строк определителя Грама линейная комбинация остальных строк определителя. Поэтому определитель Грама. равен нулю.
Пусть система векторов a1, a2 , ..., ak линейно независима. Применим к ней процесс ортоганализации и перейдем к ей эквивалентной ортогональной системе векторов b1, b2, ..., bn. Пусть матрица перехода от первой системы векторов ко второй. Тогда имеет место формула
G = Tt G T , (1)
где G и G' определители Грама систем векторов a1, a2, ..., an и b1, b2, ..., bn соответственно. Для ортогональной системы векторов матрица Грама равна
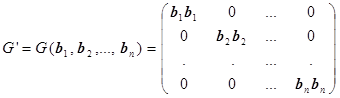 .
.
Так как bi bi > 0, то последний определитель больше нуля. Поэтому
detG = det(Tt G T) = detTt× detG'× detT = (detTt)2× detG' > 0.
4. Ортогональная система векторов. Процесс ортогонализации. Ортогональный и ортонормированный базис.
Определение 1. Два вектора a и b из E называются ортогональными, если их скалярное произведение равно нулю.
Определение 2. Система ненулевых векторов b1, b2, ..., bm называется ортогональной системой векторов, если различные векторы этой системы попарно ортогональны: bibj = 0 (i, j = 1, 2,…, m; i ¹ j).
Теорема 1.Ортогональная система векторов линейно независима.
Доказательство. Пусть a1, a2 , ..., ak -ортогональная система ненулевых векторов из V. Доказывая линейную независимость системы a1, a2 , ..., ak допустим, что выполняется равенство:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.