В рассматриваемом примере перемещение прямой следует осуществлять до точки C. Координаты этой крайней точки многогранника будут оптимальным решением задачи Xопт=(x1опт, x2опт). (Указанные координаты могут быть найдены также из решения системы уравнений, составленной из уравнений пересекающихся прямых.) В данной задаче Xопт= (4; 1,5). Значение максимума ЦФ zопт =5,5.
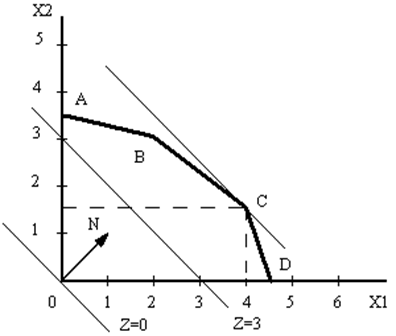 |
Рис. 2.2.
Отметим, что в частном случае, когда коэффициенты целевой функции пропорциональны коэффициентам какого-либо ограничения, имеется множество оптимальных точек, составляющих сторону многоугольника. (Так, например, если бы целевая функция задачи имела вид z = x1 + 4x2, то множество оптимальных решений составляли бы все точки стороны AB).
Геометрическая интерпретация решения задачи ЛП позволяет наглядно представить следующие возможные варианты решения задачи вида (2.1): 1) задача имеет единственное решение, лежащее в крайней точке – вершине выпуклого многоугольника (для ограниченной или неограниченной области); 2) задача имеет бесконечное число решений, среди которых имеется хотя бы одно решение, лежащее в крайней точке допустимого многоугольника (для ограниченной или неограниченной области); 3) задача имеет допустимые решения, но не имеет оптимального решения (случай неограниченности ОДР); 4) задача не имеет допустимых решений (ограничения несовместны) а, следовательно, не имеет и оптимального решения.
Случаи 1,2 и 3 для неограниченной ОДР приведены на рисунке 2.3 (варианты а,б,в).
На том же рисунке приведен случай 4 (вариант г).
![]()
![]()
![]()
![]()
![]()
![]() х2 а х2
б
х2 а х2
б
![]()
![]()
 |
|||||
![]()
![]()
![]()
![]()
![]() CХ=Z
CХ=Z
![]()
![]()
![]()
![]() x1
x1
x1
x1
N N CX=Z
 |
![]()
![]()
![]()
![]() x2 в
x2 г
x2 в
x2 г
![]()
![]()
![]() CX=Z
CX=Z
 |
|||
![]()
![]()
N xi xi
Рис. 2.3
Таким образом, общая схема решения задачи ЛП должна предусматривать проверку совместности условий и ограниченности допустимой области и дальнейший выбор среди всех вершин многогранного выпуклого множества вершины, на которой достигается максимальное значение целевой функции.
2.4. Некоторые понятия линейной алгебры и теории выпуклых множеств
Дальнейшие изучение свойств задачи ЛП требует использование ряда понятий и определений линейной алгебры и теории выпуклых множеств.
К ним относятся следующие понятия:
- n-мерный вектор;
- n-мерное векторное пространство;
- линейная комбинация векторов;
- линейная зависимость и линейная независимость системы векторов;
- базис;
- выпуклая линейная комбинация точек n-мерного пространства;
- выпуклое множество;
- крайняя точка.
Эти понятия рассмотрены в приложении А.
Рассмотрим далее каноническую задачу ЛП вида (2.4). Запишем ее в векторной форме, введя для каждого столбца матрицы А обозначение Аj, а для столбца свободных членов (вектора ограничений) обозначение В.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.