Лекция 12. проф.
Содержание лекции 11. Ранее было показано, что в плоскости w удобно выполнять исследование устойчивости и синтез линейных ДСАУ. Здесь изложены основные материалы по использованию критерия Гарри Найквиста для решения первой задачи. Подробно изложена методика получения асимптотических псевдочастотных характеристик для дискретных систем разной структуры. Это необходимо хорошо освоить, приступая в 12 лекции к изучению проблемы синтеза ДСАУ.
ГЛАВА 9. Методы синтеза ДСАУ
9.1. Синтез различных моделей ДСАУ
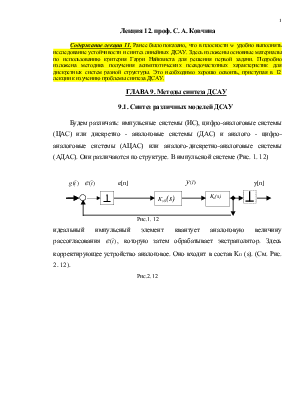
Будем различать: импульсные системы (ИС), цифро-аналоговые системы (ЦАС) или дискретно - аналоговые системы (ДАС) и аналого - цифро-аналоговые системы (АЦАС) или аналого-дискретно-аналоговые системы (АДАС). Они различаются по структуре. В импульсной системе (Рис. 1. 12)
 |
идеальный импульсный элемент квантует
аналоговую величину рассогласования ![]() ,
которую затем обрабатывает экстраполятор. Здесь корректирующее устройство
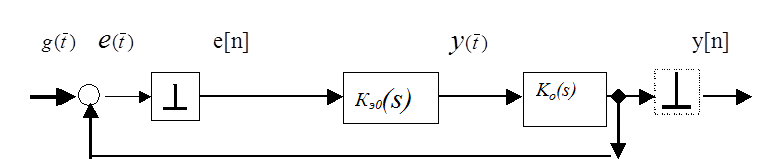
аналоговое. Оно входит в состав KO (s). (См. Рис. 2. 12).
,
которую затем обрабатывает экстраполятор. Здесь корректирующее устройство
аналоговое. Оно входит в состав KO (s). (См. Рис. 2. 12).
Рис.2.12
Методика (алгоритм)
синтеза этой модели будет такой. Задаемся ![]() , и
по этой характеристике одним из способов, изложенных в предыдущей лекции,
находим
, и
по этой характеристике одним из способов, изложенных в предыдущей лекции,
находим ![]() . Так - же поступаем с
характеристикой
. Так - же поступаем с
характеристикой ![]() . Вычитанием
из
. Вычитанием
из ![]() л. а. х
л. а. х ![]() находим л. а. х.
регулятора
находим л. а. х.
регулятора ![]() . При этом нужно пользоваться
специальными таблицами показателей качества ИС1).
. При этом нужно пользоваться
специальными таблицами показателей качества ИС1).
9.2. Разновидности реализаций регулятора (синтеза) импульсных
систем
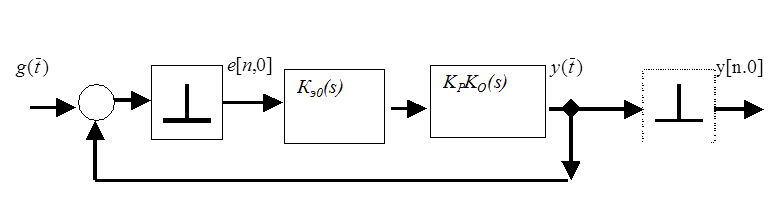
Первый вариант. Если все постоянные времени
выбранного аналогового регулятора будут больше 0,5Т, то его физическую
реализуемость можно выполнить и программно, имея ![]() , по следующему
алгоритму:
, по следующему
алгоритму:
 (1. 12)
(1. 12)
![]() Рис.3.
12
Рис.3.
12
Форма ![]() реализуется программно
(см. главу 6, разделы 6.8 - 6.9).
реализуется программно
(см. главу 6, разделы 6.8 - 6.9).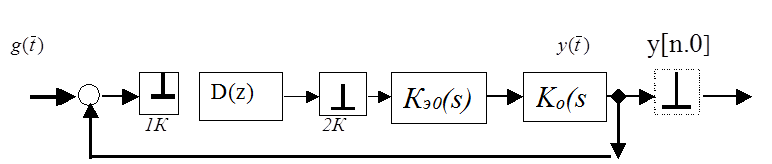
При этом ИС приобретает
структуру ЦАС (рис 3. 12). Здесь ключи 1К и 2К символизируют
реальные АЦП и ЦАП, но их наличие при аналитических исследованиях не
учитывается. При таком варианте синтеза нужно учесть его две особенности.
Программная реализация потребует время "τр", которое можно
вычислить по сумме элементарных операций вычислительного устройства, на котором
создали регулятор. Если τр составляет ощутимую долю интервала
квантования Т (например, τр>0,2 T), то это запаздывание принято
учитывать в модели объекта  .
.
________________________________________________________________________________
1)Бесполезно искать эти таблицы в книгах. Это наш "продукт" (см. файлы: Табл.1.doc, Табл.2.doc, Табл.3.doc,).
Коэффициенты передачи АЦП и ЦАП кА и кЦ, перемножаясь, составляют "единицу". Поэтому их не учитывают только при отработке сигнала управления
![]() . Если же исследуется отработка схемой 3.12 иного сигнала,
(например, возмущения
. Если же исследуется отработка схемой 3.12 иного сигнала,
(например, возмущения ![]() ), то кА
и кЦ нужно учесть в новой структуре ИС.
), то кА
и кЦ нужно учесть в новой структуре ИС.
При этом для построения ![]() и
и ![]() пользуемся сведениями
первой или второй строк Табл.14.а doc.
пользуемся сведениями
первой или второй строк Табл.14.а doc.
Второй вариант. Если только часть постоянных времени
выбранного регулятора будут больше 0,5Т, то его физическую
реализуемость, имея ![]() ,
можно выполнить в аналоговой ("аппаратной"), программно - аппаратной
или программной формах.
,
можно выполнить в аналоговой ("аппаратной"), программно - аппаратной
или программной формах.
Третий вариант. Если наклон л. а. х. эталонной
модели LЭ(ω) синтезируемой ИС при пересечении с
прямой ![]() равен -60 дБ/дек (см. рис.4.12), то математическая модель такой физически
существующей ИС синтезирутся как обычная аналоговая линейная САУ.
Об этом мы заявляли еще во "Введении" к этим лекциям.
равен -60 дБ/дек (см. рис.4.12), то математическая модель такой физически
существующей ИС синтезирутся как обычная аналоговая линейная САУ.
Об этом мы заявляли еще во "Введении" к этим лекциям.
Четвертый
вариант.
Часто возникает ситуация, когда LЭ(ω)
имеет пересечении с прямой ![]() при
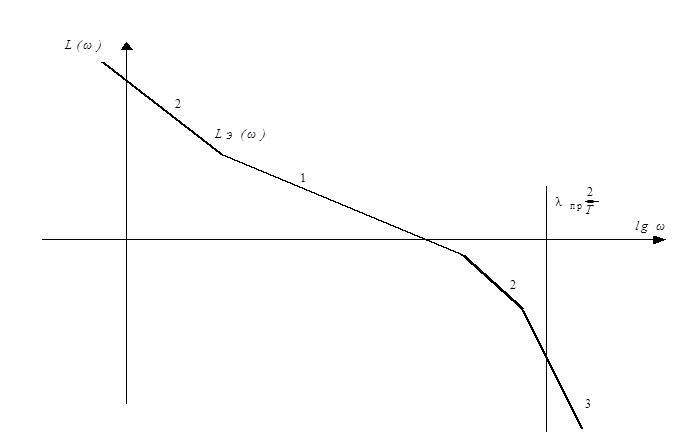
-20 дБ / дек или -40 дБ / дек, а характеристика не скорректированной системы LНС(ω) пересекает ту же прямую с наклоном -60 дБ / дек (см. рис.5.12). Тогда синтез ДСАУ выполняется как ИС.
Характеристика
при
-20 дБ / дек или -40 дБ / дек, а характеристика не скорректированной системы LНС(ω) пересекает ту же прямую с наклоном -60 дБ / дек (см. рис.5.12). Тогда синтез ДСАУ выполняется как ИС.
Характеристика ![]() находится по
данным первой или второй строк Табл.14.а doc, а для
находится по
данным первой или второй строк Табл.14.а doc, а для ![]() используем данные третей
строки того же файла.
используем данные третей
строки того же файла.
Параметры и показатели качества эталонных моделей импульсных систем приведены в Табл. 1, помещенной на странице 9.
 |
Пятый вариант. Часто в моделях и реальных электромеханических системах (ЭМС) возникают "упругие звенья". Их возникновение связано либо с
Рис.4. 12.
повышением динамики (ускорений, торможений ) в механической части системы или из - за повышенных нагрузок в этих режимах (механическая часть и канаты всех видов "подъемников", кинематические цепи роботов, кинематические цепи и инструменты металлорежущих станков, буровых установок глубокого бурения и пр.) Их называют "упругостями первого рода". Как правило, они высокочастотны.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.