Пример решения:
%I0.13-пуск против часовой стрелки
%I0.12 –пуск по часовой стрелке
%Q0.4- движение против часовой стрелки
%Q0.5- движение по часовой стрелке
%I0.15- стоп
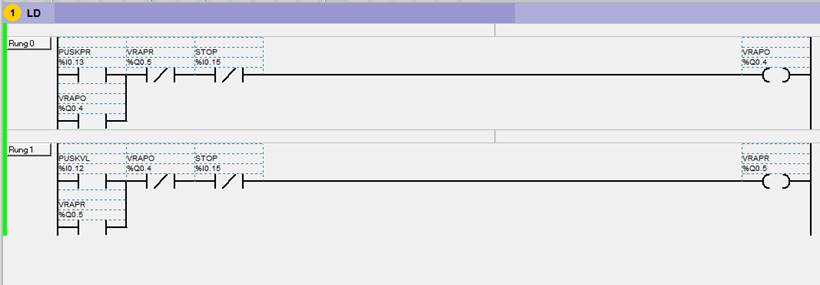
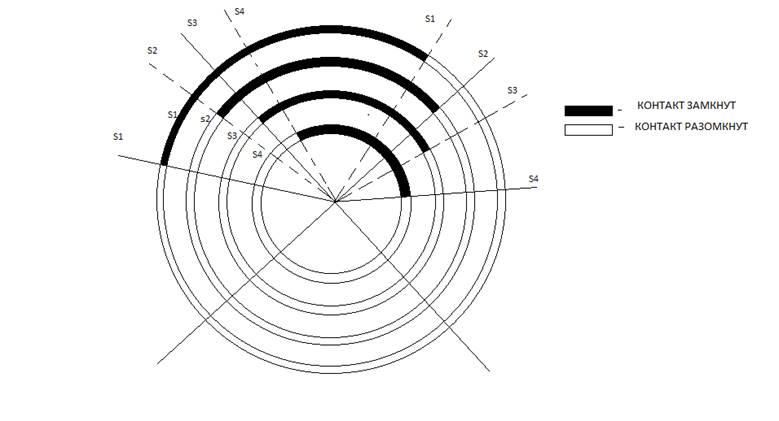
Эта схема управления обеспечивает только аппаратный останов , то есть задвижка остановится при достижении предельной границы вращения.(либо по нажатию кнопки стоп)
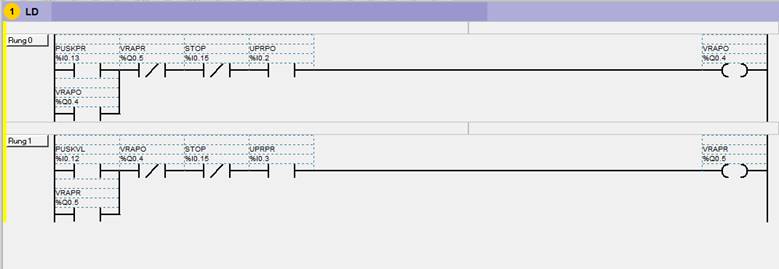
В этой схеме управления останов производится при прекращении сигнала %I0.2 либо %I0.3
Используемые входы и выходы:
I0.12 Q0.14
I0.13 Q0.15
I0.14 Q0.4
I0.15 Q0.5
I0.2
I0.3
Цель работы: Составление и отладка программ с использованием процедур предварительной, последовательностной и пост-обработки, инструкций активации и деактивации шагов
Задание:
1. Создайте проект с именем "Ваша фамилия_6”
2. Изучите раздел программирования на языке Grafcet в справочном пособии.
3. В секции №1 реализуйте управление от сигнала %I0.0 системным битом %S21, реализующим инициализацию начального состояния Grafcet.
4. В секцию №2 введите фрагмент Grafcet с линейной последовательностью шагов 1, 2 и 3 . Переход от первого ко второму этапу происходит по сигналу %I0.21, от второго к третьему - по сигналу %I0.22, от третьего к первому - по сигналу %I0.23
5. В секции №3 первую цепь секции определите как начало секции пост-процессора (признак =*= в спецификации типа цепи Rung: Step post) и введите элементы управления выходом %Q0.8 от сигнала %X1. В последующих цепях осуществите управление выходами %Q0.2 … %Q0.3 от сигналов %X2 … %X3 соответственно
6. Перед секцией пост-процессора вставьте новую секцию (№3) и введите фрагмент Grafcet, состоящий из шагов 4 … 7 с альтернативным ветвлением по или
7. Перед секцией пост-процессора вставьте новую секцию (№4) и введите фрагмент Grafcet, состоящий из шагов 8 … 13 с параллельным ветвлением по и. В предыдущей секции задайте переход от шага 7 к шагу 8.
8. После шага 13 организуйте цикл, состоящий из последовательных шагов 14, 15 и 16. Выход из цикла и переход к шагу №1 задается сигналом %I0.11 = 1.
9. Измените условия перехода от шага 14 к 15 и от 15 к 16 на выдержки времени, реализуемые на таймерах %TM0 и %TM1. Для этого функциональные блоки таймеров поместите в секцию пост-процессора, а контакты их выходов в цепи управления соответствующих шагов.
10. Переместите функциональные блоки таймеров из секции пост-процессора в секции соответствующих шагов.
Используемые входы и выходы:
I0.16-I0.19 Q0.8
I0.12-I0.15 Q0.2
I0.20 Q0.3
I0.21 Q0.4-Q0.7
I0.22 Q0.13-Q0.15
I0.23
Примечание :Решения для работ №3,№4,№5 и №6 не вошли в
записку, чтобы не загромождать ее. Данный материал выслан в электронном виде
на почту.
6. Выводы по работе.
В ходе выполнения курсовой ,мной был создан цикл лабораторных работ по стенду TWIDO. По каждой из работ создана два пособия – первое-постановка и пример решения задачи, второе- описание необходимых теоретических знаний для выполнения задачи.
Созданный цикл обеспечивает начальное знакомство и понимание обучающимися основных возможностей контроллера TWDLCAE40DRF, программной среды TWIDOSUITE, языков программирования LD, IL, GRAFSET, различных функциональных блоков и основных принципов программирования микроконтроллеров.
Для всех задач имеются принципиальные схемы , показывающие как электрически соединены и выполнены элементы на стенде , для каждой конкретной задачи. Эти схемы так же присланы на почтовый ящик.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.