12. Запустите программу на контроллере.
ПРИМЕЧАНИЕ: воспользуйтесь специальным справочным пособием по этой лабораторной работе!
Используемые входы и выходы:
I0.20 Q0.12
I0.21 Q0.13
I0.22 Q0.8
I0.23 Q0.9
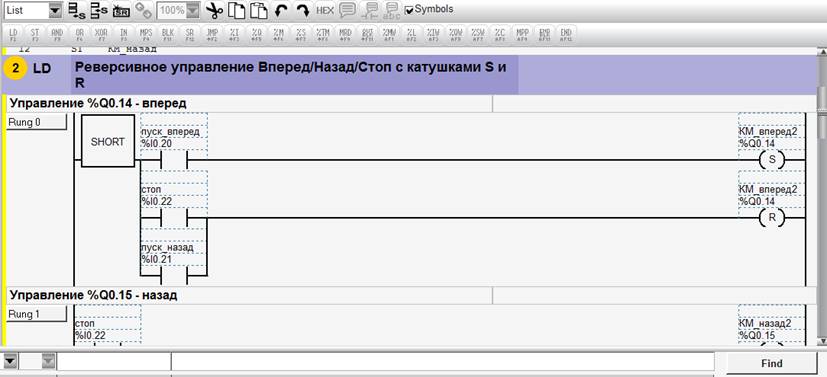
2. Разработайте и введите в секцию 1 на языке Ladder ( LD - релейно-контакторная схема) программу, реализующую типовой узел выбора направления вращения.
Используйте следующие органы управления, входы и выходы программируемого контроллера:
"Пуск вперед" - %I0.20
"Пуск назад" - %I0.21
"Стоп" - %I0.22
"Контактор вперед" %Q0.12
"Контактор назад " %Q0.13
Руководствуйтесь указаниями раздела 5.Язык лестничных диаграмм справочной системы.
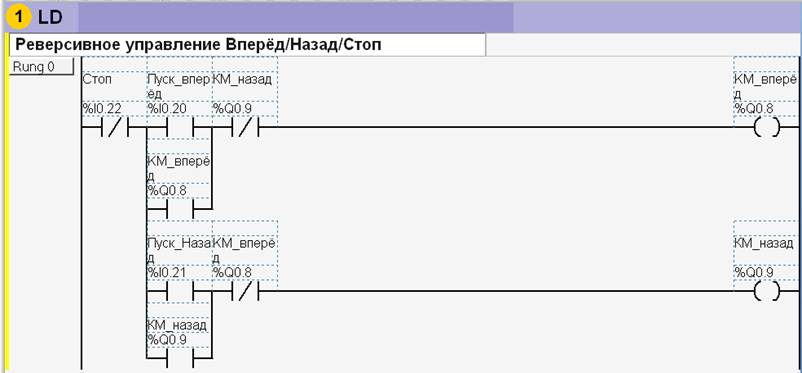
Использование в параллельных ветвях нормально разомкнутых контактов КМ_вперед и КМ_назад обеспечивает “самоподхват” контакторов. Т.е. после того, как кнопка пуск вперед(пуск назад) будет отпущена , контакторы останутся включёнными.
3. Руководствуйтесь указаниями в разделе справочной системы “6. Симулятор”
произведите запуск симулятора,
выбрав режим Program ® Program и
кликнув иконку ![]() (Simulation).
Запустите выполнение контроллером Вашей программы, кликнув иконку RUN
(Simulation).
Запустите выполнение контроллером Вашей программы, кликнув иконку RUN ![]() . Для останова программы
используйте иконку STOP
. Для останова программы
используйте иконку STOP ![]() .
Контролируйте режим работы ПЛК по светодиодным индикаторам RUN, ERR.
.
Контролируйте режим работы ПЛК по светодиодным индикаторам RUN, ERR.

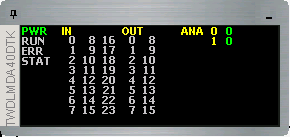
Проверьте правильность функционирования программы, изменяя произвольным образом состояния использованных входов, кликая их номера на панели отображения аппаратных средств контроллера.
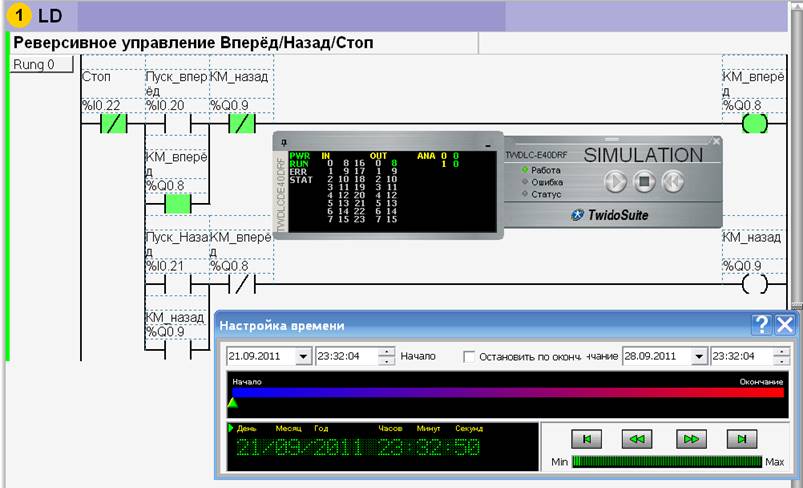
Как видно из этого примера выполнения программы, при нажатии кнопки “Пуск вперед” замыкается контактор “КМ_вперед”
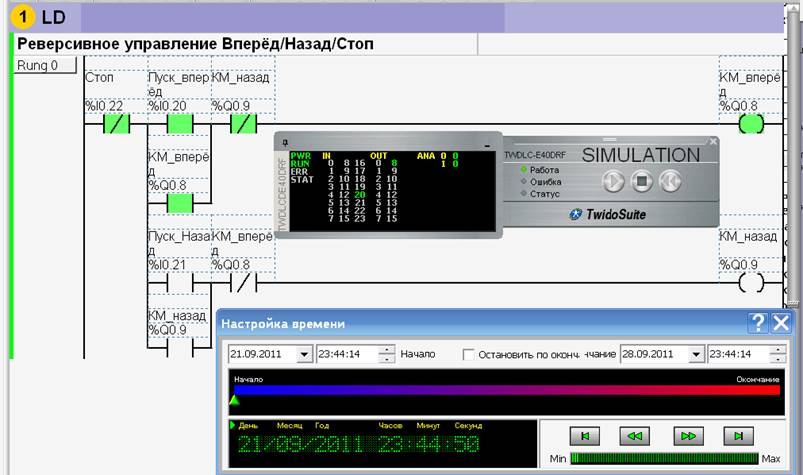
Отпустите кнопку “Пуск_вперед”, , контактар «КМ вперёд» остался включённым.
4. Разработайте и введите в секцию 2 на языке LD программу, реализующую такой же типовой узел выбора направления вращения, но с использованием инструкций (S) и (R) для управления выходами
"Контактор вперед" %Q0.10
"Контактор назад " %Q0.11
Используйте те же органы управления и входы ПЛК:
"Пуск вперед" - %I0.20
"Пуск назад" - %I0.21
"Стоп" - %I0.22
Проверьте действие обоих узлов при одновременном нажатии %I0.20 и %I0.21. Что изменится в работе схемы, если инструкции (S) и (R) поменять местами?
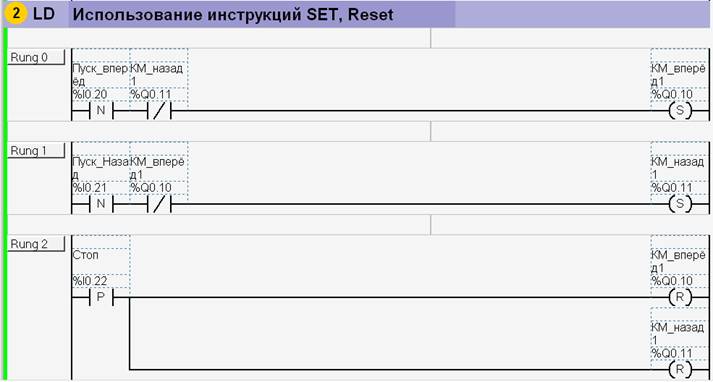
1. Выполните анализ работы этой схемы, сравните со схемой, представленной в первой цепи.
2. Замените символы дифференцирования сигналов с кнопок управления на символы опроса входов. Что изменилось в работе схемы?
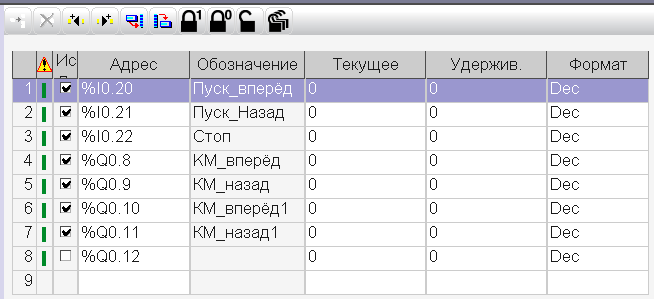
5. Создайте анимационную таблицу “Узел Вперед-Назад-Стоп” и вставьте в нее используемые входы и выходы.
Для этого обратитесь к окну Program ® Debug ® Manage animation tables и руководствуйтесь указаниями в разделе справочной системы “6. Симулятор”
Команда ![]() (insert line) вставляет в таблицу новую
строку. Команда
(insert line) вставляет в таблицу новую
строку. Команда ![]() (delete line) удаляет из таблицы выделенную
строку. Для их активизации нужно кликнуть на номер строки в первом столбце
таблицы. Для ускорения вставки последовательных элементов используйте команды
(delete line) удаляет из таблицы выделенную
строку. Для их активизации нужно кликнуть на номер строки в первом столбце
таблицы. Для ускорения вставки последовательных элементов используйте команды ![]() (Add Next Instance и Add Previous Instance). Наблюдайте
индикацию изменения состояния входов и выходов в процессе выполнения программы.
Проверьте действие команд сохранения и возврата текущих значений переменных
анимационной таблицы
(Add Next Instance и Add Previous Instance). Наблюдайте
индикацию изменения состояния входов и выходов в процессе выполнения программы.
Проверьте действие команд сохранения и возврата текущих значений переменных
анимационной таблицы ![]() (Read Retained Values),
(Read Retained Values), ![]() . Проверьте действие команд
принудительной установки выходов в заданное состояние и ее отмены
. Проверьте действие команд
принудительной установки выходов в заданное состояние и ее отмены ![]() (Force 1, Force
0, Clear Force,
Clear All Force).
(Force 1, Force
0, Clear Force,
Clear All Force).
![]() Внимание! Неожиданное
действие оборудования. Применение этих команд при отладке программы на реальном
оборудовании может быть небезопасным. При принудительной установке выхода в
ноль или единицу Вы должны заблаговременно знать, как это отразится на
технологическом процессе и управляемом оборудовании.
Внимание! Неожиданное
действие оборудования. Применение этих команд при отладке программы на реальном
оборудовании может быть небезопасным. При принудительной установке выхода в
ноль или единицу Вы должны заблаговременно знать, как это отразится на
технологическом процессе и управляемом оборудовании.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.