Попытаемся внести предельную ясность в этот важный вопрос.
Через
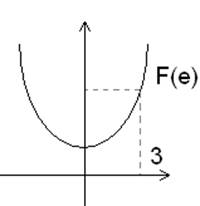
«рабочую точку», как показано на рис., проведена касательная ![]() , где kн – коэффициент
линеаризации нелинейности.
, где kн – коэффициент
линеаризации нелинейности.
Поскольку
F(e) = z, то ![]() , где
, где ![]() - добавка нелинейной
функции z при изменении
аргумента е
на
величину
- добавка нелинейной
функции z при изменении
аргумента е
на
величину ![]() .
.
Разложим F(e) в ряд Тейлора
при ![]() :
:
![]()
Обычно,
поясняя этот метод линеаризации, говорят: "будем рассматривать первые два
члена ряда Тейлора![]() ".
".
Следовательно,
можно считать, что ![]() при малых значениях
при малых значениях ![]() .
.
Тогда
рассматриваемую нелинейную структуру можно заменить линейной при ![]() :
:

Анализ и синтез исследуемой НСАУ теперь можно приближенно выполнить по методикам, пригодным для ЛСАУ.
На
самом деле ![]() и
и ![]() различны, поскольку имеются
третий и последующие члены ряда Тейлора, которые математически точно определяют
эту погрешность
различны, поскольку имеются
третий и последующие члены ряда Тейлора, которые математически точно определяют
эту погрешность ![]() .
.
Попытаемся оценить
эти отличия. Итак, запишем вновь разложение F(e) в ряд Тэйлора:![]()
![]() , откуда
, откуда
 … ,
… ,
Для
выпуклых кривых ![]() <0, но и
<0, но и ![]() , а для вогнутых кривых обе эти
зависимости положительны. Кроме того, учтем, что обычно третья производная
численно меньше второй и
, а для вогнутых кривых обе эти
зависимости положительны. Кроме того, учтем, что обычно третья производная
численно меньше второй и ![]() числено резко уменьшается с возрастанием "п".
Например, при очень большой величине
числено резко уменьшается с возрастанием "п".
Например, при очень большой величине ![]() =0,2,
=0,2, ![]() =0,04, уже очень малая
=0,04, уже очень малая ![]() =0.0016. Поэтому последнее выражение можно
обоснованно заменить следующим приближенным равенством:
=0.0016. Поэтому последнее выражение можно
обоснованно заменить следующим приближенным равенством:
 , где
, где ![]() и
и ![]() - относительные изменения
входной и выходной координат статической нелинейности, определенные
относительно базовых параметров рабочей точки
- относительные изменения
входной и выходной координат статической нелинейности, определенные
относительно базовых параметров рабочей точки ![]() .
.
Пользоваться
полученным выражением очень просто, задаемся величиной ![]() и вычисляем конкретную
величину
и вычисляем конкретную
величину ![]() . Вот суть этих длительных
пояснений.
. Вот суть этих длительных
пояснений.
Пример: Задана однозначная четно-симметричная нелинейность:
|
|
Выбираем на ней рабочую точку
с координатой eo =3, тогда zo =39. Вычислим производные
Теперь эти значения подставим
в выражение Так что говорить о "малости" приращения аргумента Δe нельзя. |
В
заключение напомним, что при такой линеаризации НСАУ структура эквивалентной
линейной САУ должна иметь два сигнала управления. Первый, постоянный
сигнал go необходим для вывода системы в рабочую точку с координатами
zo и eo. Величина сигнала go вычисляется в
соответствии с формулой  , а переменный сигнал
, а переменный сигнал ![]() воспроизводит
приращения
воспроизводит
приращения ![]() ,
, ![]() и
и ![]() .
.
Линеаризация секущими
Данный способ применяется когда необходимо линеаризовать нелинейность при больших отклонениях входного сигнала e или при "многоступенчатости" однозначной статической характеристике нелинейного элемента. Например, такие нелинейности присущи всем "аналого-цифровым" и "цифро-аналоговым" преобразователям (АЦП и ЦАП) любых вычислительных машин. Метод основан на двух гипотезах М. А Айзермана.
Гипотеза 1. 1.1. Пусть имеется нелинейная САУ с устойчивой линейной частью Ko(p) и произвольная аналитически заданная однозначная статическая нелинейность.

1.
2. Нелинейность можно заменить линейным эквивалентом с коэффициентом передачи  , который
находится как решение экстремальной задачи:
, который
находится как решение экстремальной задачи:  , где p(e) - плотность
распределения вероятности входного сигнала, если он является случайной
величиной.
, где p(e) - плотность
распределения вероятности входного сигнала, если он является случайной
величиной.
При расчетах нужно принять p(e)=1, так как сигнал e(t) детерминированный. Устремлять интеграл к нулю нельзя, это приводит к комплексным корням для значения kн, хотя реально данный коэффициент - вещественная положительная величина.
Гипотеза 2. Для оценки устойчивости исходной нелинейной системы её можно заменить линейным прототипом с такой же ЛЧ, но вместо нелинейной части F(e) - линейное безинерционное звено с коэффициентом передачи kн.

Тогда устойчивость НСАУ "в малом" будет такой же, как и для ЛСАУ, если нелинейность F(e) располагается внутри заданных секторов (между прямыми " kн e" и "kkr e"), то есть соблюдается следующее условие:
![]() , где
kkr
-предельный
(наибольший) коэффициент передачи ЛСАУ, выводящий её на границу устойчивости.
, где
kkr
-предельный
(наибольший) коэффициент передачи ЛСАУ, выводящий её на границу устойчивости.
Пример 1.
В структуре рассматриваемой НСАУ задана её линейная часть (ЛЧ) оператором:
![]() , где T1=1,0c., T2=0,5c.,
T3=0,1c.
, где T1=1,0c., T2=0,5c.,
T3=0,1c.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 и найдем: при
и найдем: при