Минимальный радиус поворота трактора с
двойным дифференциалом ![]() Следовательно,
поворот такого трактора на месте не может быть осуществит, потому что
минимальный радиус его поворота зависит от передаточного числа двойного
дифференциала, которое находится в пределах 2,7-3.
Следовательно,
поворот такого трактора на месте не может быть осуществит, потому что
минимальный радиус его поворота зависит от передаточного числа двойного
дифференциала, которое находится в пределах 2,7-3.
Бортовые фрикционы и планетарные механизмы поворота. Эти механизмы поворота обладают одинаковой кинематической характеристикой, поэтому рассмотрим их вместе.
Минимальный радиус поворота трактора с бортовыми фрикционами (рис. 8.14) осуществляется при отключенной отстающей гусенице, которой не сообщается движение от двигателя. В то же время ведущее колесо забегающей гусеницы придает ей скорость прямолинейного движения. Таким образом, ω1=0, а минимальный радиус поворота Rц.min=0,5Вк.
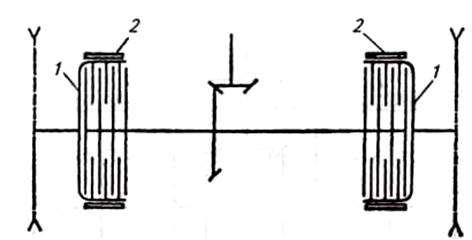
Рисунок 8.14 - Схема механизма поворота с бортовыми фрикционами: 1 — фрикционная муфта; 2 — тормоз
В соответствии с планом скоростей на рисунке 8.14 скорость центра трактора с фрикционным механизмом поворота при движении на повороте
 .
.
Согласно полученному выражению скорость трактора на повороте меньше, чем при прямолинейном движении. Если в это выражение подставить значение минимального радиуса поворота Rц.min=0,5Вк, то
vц.min=0,5vпр, т. е. при повороте трактора, оснащенного фрикционным механизмом поворота, с минимальным радиусом скорость его движения равна половине скорости прямолинейного движения.
8.4.2. Мощность преодоления внешних сопротивлений
при повороте гусеничного трактора
Мощность, необходимая для преодоления внешних сопротивлений затрачиваетсяна перемещение трактора и деформацию грунта гусеницами. Эта мощность не учитывает затраты энергии на трение в механизмах поворота и других механизмах трансмиссии, составляющих в некоторых случаях значительную долю энергии двигателя.
Составляющими мощности преодоления внешних сопротивлений являются мощность сопротивления качению трактора Nf, мощность преодоления сопротивления повороту опорных ветвей гусениц относительно полюсов поворота Nμ, мощность буксования (юза) Nδ. Из этого можно составить уравнение мощностного баланса на преодоление внешних сопротивлений:
Nc=Nf2+Nf1+Nμ+Nδ2+Nδ1. (8.4)
Действительные скорости движения гусениц при повороте отличаются от теоретических V1 и V2 (рисунок 8.14). скорость забегающей гусеницы снижается вследствие буксования на величину V2δ2, а скорость отстающей повышается за счет юза на V1δ1. Тогда действительные скорости будут V2'=V2(1-δ2) и V1'=V1(1+δ1).
Отдельные составляющие уравнения можно записать в следующем виде:
Nf2=Рf2v'2; Nfl=Pflv'1; Nμ=Mc.п(v'2–v'1)/Bк;
Nδ2=Р2(v2–v'2)=(Рf2+Mc.п/Bк)(v2–v'2);
Nδ1=Р1(v'1–v1)=(-Рf1+Mc.п/Bк)(v'1–v1).
Подставив полученные выражения отдельных составляющих в уравнение (8.4), после необходимых преобразований получим
Nc = P2v2 - Plvl. (8.5)
Выражение (8.5) удобно тем, что расчет мощности внешних сопротивлений можно выполнять, зная лишь теоретические скорости v2 и v1, не учитывая буксование и скольжение. Сила Р1в этом выражении имеет знак плюс, если отстающая гусеница работает в активном режиме, т. е. получает движение от двигателя.
При повороте забегающая гусеница стремится перемещать трактор прямолинейно, а отстающая – или отключается, или притормаживается. При этом с корпуса трактора на отстающую гусеницу передается сила тяги, создаваемая забегающей гусеницей и толкающая ее также вперед. В пятне контакта отстающей гусеницы с почвой возникает горизонтальная продольная реакция почвы, которая стремится вращать отстающую гусеницу в направлении, соответствующем движению трактора вперед. Создаваемый реакцией почвы крутящий момент на отстающей гусенице передается через механизм поворота на забегающую гусеницу, если при включении режима поворота кинематическая связь бортов не разрывается полностью или с помощью тормоза отстающая гусеница не останавливается. Процесс передачи через трансмиссию тормозной мощности с отстающей гусеницы на забегающую называется рекуперацией мощности. Это положительное свойство механизма поворота, позволяющее снизить энергетические затраты на поворот машины.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.