Если плоскость рассматривать в пространстве, то симметрия относительно оси будет равносильна повороту вокруг нее на угол 1800. Тогда скользящее отражение составиться из такого поворота и параллельного переноса вдоль оси. Образно это напоминает ключ в замочной скважине, который поворачивают, а затем вытаскивают.
Частным случаем скользящего отражения (при нулевом
векторе ![]() ) является осевая симметрия.
) является осевая симметрия.
Скользящее отражение при ненулевом векторе ![]() не имеет
ни одной неподвижной точки.
не имеет
ни одной неподвижной точки.
Замечание. Скользящее отражение является движением, потому что на каждом из двух его этапов сохраняются расстояния между точками в их образах.
|
|
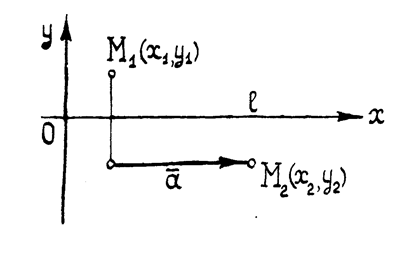
Формулы пересчета координат точек при скользящем отражении наиболее просто выглядят (3) в декартовой системе с осью Ох вдоль оси симметрии l :
Здесь
подразумевается, что вектор |
4). Поворот плоскости. Обозначение: ![]() .
.
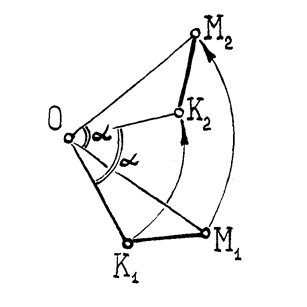
Определение. Поворотом
![]() , задаваемым центром О и
значением угла
, задаваемым центром О и
значением угла ![]() , называется
преобразование плоскости , при котором всякая точка М1 получает
образ М2 , лежащий с ней на общей окружности с центром О , причем
угол
, называется
преобразование плоскости , при котором всякая точка М1 получает
образ М2 , лежащий с ней на общей окружности с центром О , причем
угол ![]() М1ОМ2 равен
значению угла
М1ОМ2 равен
значению угла ![]() и отмеряется против
часовой стрелки , если это значение положительно , и по часовой стрелке – в
противном случае.
и отмеряется против
часовой стрелки , если это значение положительно , и по часовой стрелке – в
противном случае.
Для обозначения берется первая буква слова Round (круг, вокруг). Легко представить себе поворот листа фанеры вокруг вбитого в стену гвоздя.
Частный случай поворота на угол ![]() при нечетном
значении k называют центральной симметрией или симметрией
относительно центра О. При четном значении коэффициента k
получится поворот на нулевой угол, то есть тождественное преобразование
плоскости.
при нечетном
значении k называют центральной симметрией или симметрией
относительно центра О. При четном значении коэффициента k
получится поворот на нулевой угол, то есть тождественное преобразование
плоскости.
Поворот на ненулевой угол имеет ровно одну неподвижную точку – центр О.
Замечание. Поворот плоскости является движением.
|
Рис.6 |
Доказательство. Пусть при повороте на угол |
Для поворота на угол ![]() обратным
преобразованием будет поворот вокруг того же центра, но уже на угол (-
обратным
преобразованием будет поворот вокруг того же центра, но уже на угол (-![]() ), то есть в обратном
направлении.
), то есть в обратном
направлении.
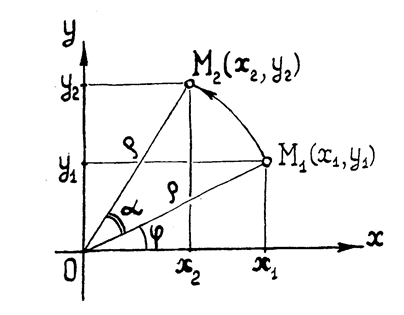
Рассмотрим изменение координат точек при повороте вокруг начала декартовой системы.
|
Рис. 7 |
Пусть при повороте на угол В прямоугольных треугольниках катеты x иy определяются равными гипотенузами ОМ1=ОМ2=r. Поэтому х 1= ОМ1 cos φ х2 = ОМ2 cos(φ+α) y 1= OM1 sin φ y2 = ОМ2 sin(φ+α) |
Используя формулы сумм косинуса и синуса, в выражениях х2 = ρ cos(φ+α) = ρcos φ cos α - ρsin φ sin α
y2 = ρ sin(φ+α) = ρcos φ sin α + ρsin φ cos α
заменим компоненты ρcos φ=x1 , ρsin φ=y1 и получим
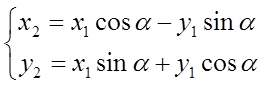 (4)
(4)
(аналитическое представление поворота вокруг начала координат).
Пример. При
повороте плоскости на угол α=π/6 вокруг начала координат точка М1(4,2)
отобразится в некоторую точку М2, координаты которой x2, y2 легко
найти из формул (4) непосредственной подстановкой в правую часть значений x1=4, y1=2, α=π/6
. После вычислений получим x2=2![]() -1, y2=2+
-1, y2=2+![]() , то есть
, то есть ![]()
![]() .
.
§ 1. 2. Общие свойства движений плоскости
Замечание 1.При движении образом произвольного отрезка будет равный ему отрезок.
Нужно доказать, что если точки А1 и В1 отображаются в А2 и В2, то образы всех точек, лежащих между А1 и В1 заполнят внутренность отрезка [А2В2].
Доказательство. Пусть некоторая точка С1 лежит между А1 и В1 (Рис.8), тогда А1С1 + С1В1 = А1В1. По определению, при движении сохраняются расстояния между точками в их образах. Поэтому после замены в формуле величин на соответственно равные им А2С2 , С2В2 и А2В2 получим новое соотношение
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 (3)
(3)