Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра автоматики и вычислительной техники
ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ №2
Дисциплина: Теория оптимальных систем автоматического управления
Тема: Расчет оптимальной по быстродействию системы управления
Выполнил студент гр. 5081/2
Руководитель
Санкт-Петербург
2009
1. Постановка задачи
Необходимо построить временные характеристики переменных состояния и фазовый портрет оптимальной по быстродействию системы для двух случаев:
— Ограничения наложены только на управление
— Ограничения наложены на управление и на переменные состояния.

Рис. 1. Структурная схема системы управления
Ограничения на
управление: ![]() .
.
Ограничения на
переменные состояния: ![]()
Начальные значения переменных состояния:
в момент времени t = 0: X2 = 0, X1 = -5;
В момент времени t = T: X2 = X1 = 0.
2. Расчет оптимальной по быстродействию системы управления с ограничениями на управление
Так как система управления является линейной системой второго порядка, то управление будет релейным с двумя моментами переключения: t = 0, t = t1.
Заданную систему управления описывает следующая система дифференциальных уравнений:
1) Т.к. начальные условия переменных состояния отрицательны, то на первом участке управление положительное: u= 1. Тогда система уравнений для первого участка:
Решив систему дифференциальных уравнений
dsolve('Dy=2,Dx+x=0.5*y','y(0)=0,x(0)=-5', 't'), найдем функции времени переменных состояния на первом участке:
2) На втором участке управление принимает значение U = -1:
Функции времени переменных состояния на втором участке
dsolve( 'Dy=-2,Dx+x=0.5*y', 't'):
С1 и С2 определяются начальными условиями.
Таким образом, необходимо определить константы С1 и С2, а также момент переключения t1 и момент окончания управления T. Система уравнений для нахождения параметров:
Решив эту систему
Y = solve ('C1*exp(-t1)+0.5*C2-t1+1 = -4*exp(-t1)+t1-1', '-2*t1+C2 = 2*t1', 'C1*exp(-T)+0.5*C2-T+1 = 0', '-2*T+C2 = 0'), получим:
С1 = -10.472135954999579392818347337463
С2 = 4.6974360224781950276599641395302
t1 = 1.1743590056195487569149910348826
T = 2.3487180112390975138299820697651
Т.о. функции времени переменных состояния на втором участке:
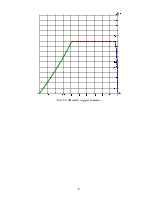
Временные характеристики управления и переменных состояния представлены на рис.2.1-2.2. Фазовый портрет системы представлен на рис. 2.3.
Рис. 2.1. Временная характеристика X1(t)
Рис. 2.2. Временная характеристика X2(t)
Рис. 2.3. Фазовый портрет системы
3. Расчет оптимальной по быстродействию системы управления с ограничениями на управление и переменные состояния
Ограничения на
управление: ![]() .
.
Ограничения на
величину переменных состояния: ![]()
Т.к. система управления является линейной системой второго порядка, то управление будет релейным с тремя участками переключения.
Заданную систему управления описывает следующая система дифференциальных уравнений:
1) Т.к. начальные условия переменных состояния отрицательны, то на первом участке управление положительное: u= 1. Тогда система уравнений для первого участка:
Решив систему дифференциальных уравнений, найдем функции времени переменных состояния на первом участке:
2) Второй
участок управления: ![]()
Переменная состояния X2 на временном отрезке постоянна и равна 1, а значит ее производная равна 0. Тогда система уравнений для второго участка:
Дифференциальное уравнение для переменной состояния X1:
![]()
Функция времени переменных состояния на втором участке:
С1 определяется начальными условиями для этого участка.
3) Третий
участок управления: ![]()
На третьем участке управление отрицательное: u=-1. Тогда система уравнений для этого участка:
Функции времени переменных состояния на третьем участке:
С2 и С3 определяются начальными условиями для этого участка.
Таким образом, необходимо определить константы С1, С2 и С3,а также моменты переключения t1 и t2 и момент окончания управления T. Система уравнений для нахождения параметров:
Решив эту систему
Y = solve ('C1*exp(-t1)+0.5 = -4*exp(-t1)+t1-1', '1 = 2*t1', 'C2*exp(-t2)+0.5*C3-t2+1 = C1*exp(-t2)+0.5', '-2*t2+C3=1', 'C2*exp(-T)+0.5*C3-T+1=0', '-2*T+C3=0'), получим:
С1 = -5.6487212707001281468486507878142
С2 = -14.356191683384119567504168010177
С3 = 5.3283626506811199463407603216815
t1 = 0.5
t2 = 2.1641813253405599731703801608408
T = 2.6641813253405599731703801608408
Т.о. функции времени переменных состояния на втором участке:
Функция времени переменных состояния на третьем участке:
Временные характеристики управления и переменных состояния представлены на рис.3.1-3.2. Фазовый портрет системы представлен на рис. 3.3.
Рис 3.1. Временная характеристика X1(t)
Рис. 3.2. Временная характеристика X2(t)
Рис. 3.3. Фазовый портрет системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.