Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра компьютерных систем и программных технологий
ОТЧЕТ
о лабораторной работе
Тема: математическое моделирование систем управления.
|
Выполнил студент: |
гр. 3081/2 И |
|
Преподаватель: |
проф. |
Санкт-Петербург
2010 г.
Цель работы:
Изучение способов математического описания и методов структурного моделирования систем управления.
Задание 1
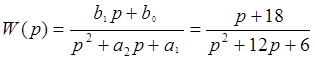
Передаточная функция системы 3-го порядка:
![]()
Получим уравнения состояния в матричной форме:
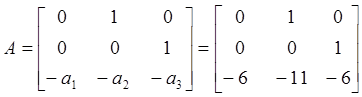

![]()
Определим управляемость системы по Калману:
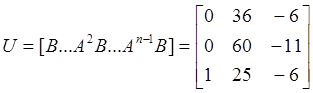
![]()
Ранг матрицы управляемости имеет размерность пространства состояний, => система полностью управляема.
Моделирование системы в Simulink:
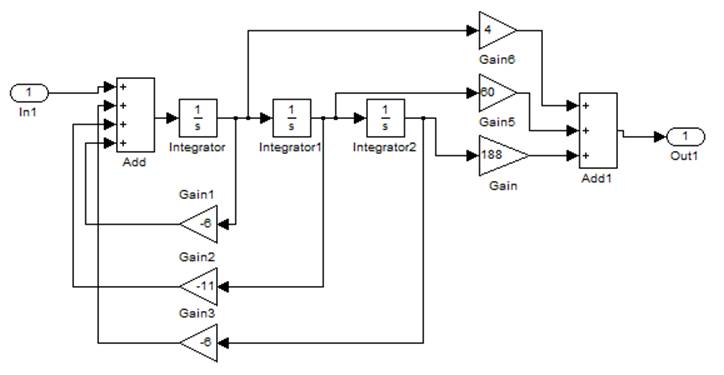
Рис.1 Структурная модель системы.
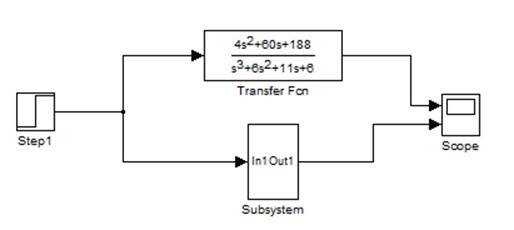
Рис. 2 Схема моделирования в Simulink.
После моделирования системы были получены следующие осциллограммы с блока Scope:
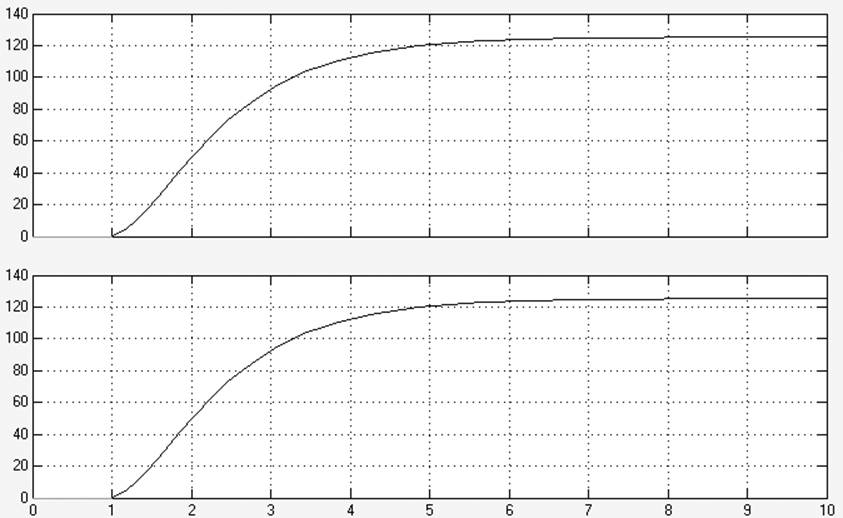
Рис.3 Осциллограммы выходных сигналов.
Как видно из рис.3 результаты моделирования совпадают, т.е результат системы представленной передаточной функцией и переменными состояниями совпали, следовательно расчеты верны.
Задание 2
Преобразование уравнений состояния к диагональной форме.
Передаточная функция системы 2-го порядка:
Получим уравнения состояния в матричной форме:
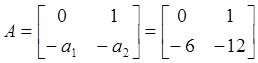
![]()
![]()
Преобразуем к диагональной форме:
собственные числа
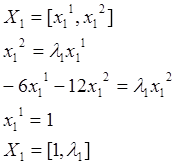
матрица перехода к новому базису Т
![]() , где x1 x2 собственные
вектора А иcходя из определения
собственного вектора:
, где x1 x2 собственные
вектора А иcходя из определения
собственного вектора:
AX = λX
таким образом определяем
собственный вектор для ![]()
собственный вектор для ![]() находиться
аналогично,
находиться
аналогично,
![]()

Матрицы A,B,C для диагональной формы
![]()
![]()
![]()
Моделирование системы в Simulink:
Структурная модель системы соответствующая диагональной канонической форме:
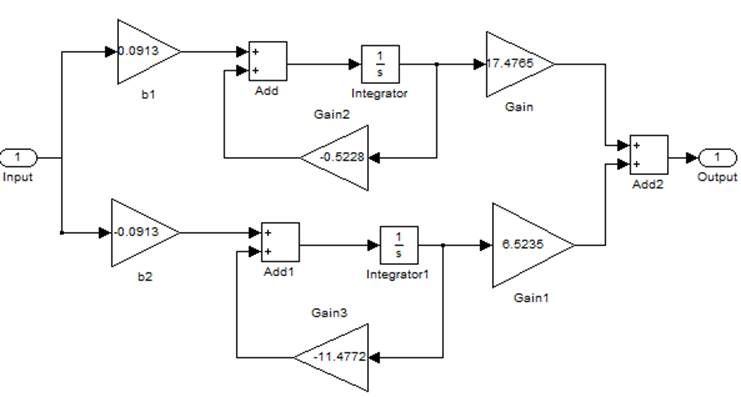
Рис.4 Структурная модель системы соответствующая диагональной канонической форме.
Была создана Subsystem как в первом пункте, и добавлена Transfer Func:
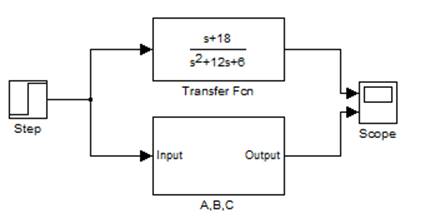
Рис. 5 Схема моделирования в Simulink.
В результате моделирования были получены осциллограммы с блока Scope, они представлены на рис. 6. По данным графикам можно судить о правильности выполненных расчетов, так как график построенный по системе представленной передаточной функцией совпадает с графиком системы представленной переменными состояниями.
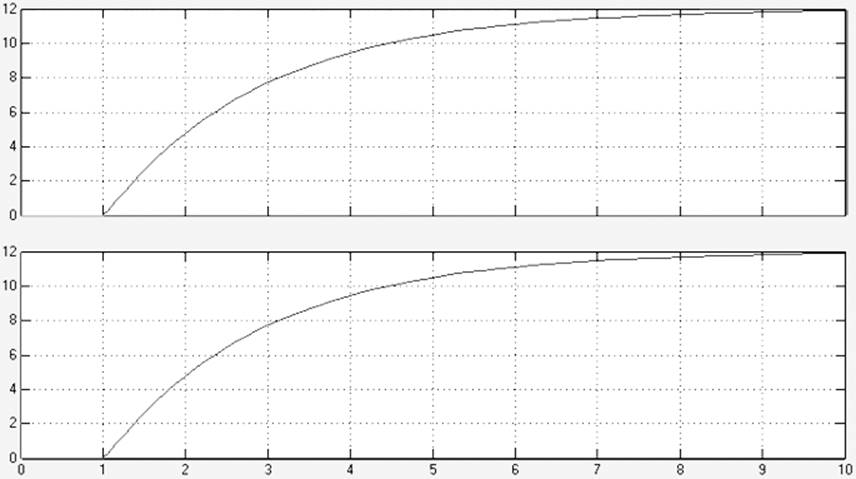
Рис. 6 Осциллограммы выходных сигналов.
Выводы:
В результате работы были получены навыки расчетов различных способов математического описания систем управления, а так же методы структурного моделирования. Используемое в работе приложение Simulink позволяет быстро составить систему, и промоделировать ее.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.