СИСТЕМЫ ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ
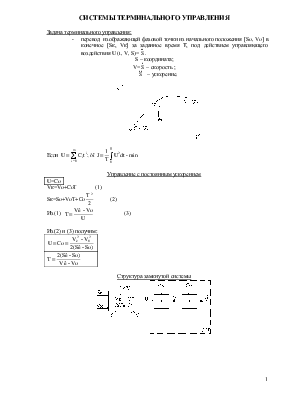
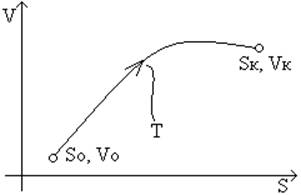
Задача терминального управления:
-
перевод изображающей фазовой точки из начального положения [So, Vo] в конечное [Sк,
Vк] за заданное время Т, под действием управляющего
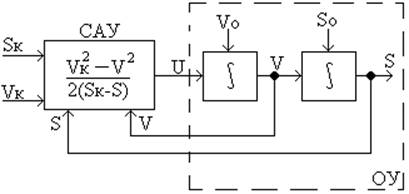
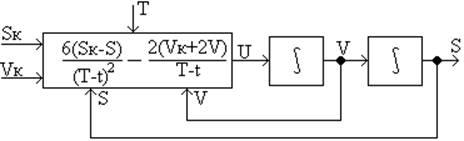
воздействия U (t, V, S)= ![]() .
.
S – координата;
V=![]() –
скорость ;
–
скорость ;
![]() –
ускорение.
–
ускорение.
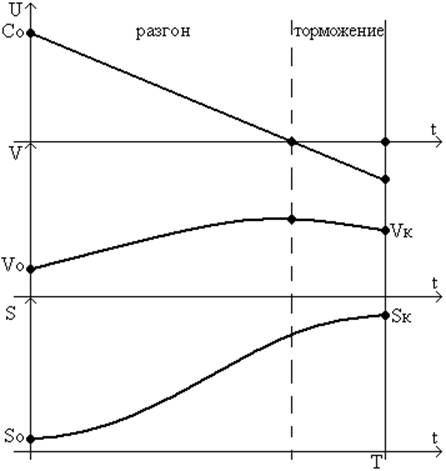
Если 
|
U=Co |
Vк=Vo+CoT (1)
Sк=So+VoT+Co![]() (2)
(2)
Из (1) ![]() (3)
(3)
Из (2) и (3) получим:
|
|
|
|
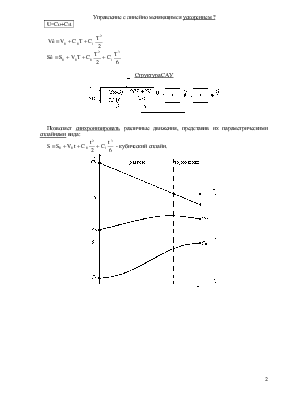
Управление с линейно меняющимся ускорением ?
|
U=Co+C1t |
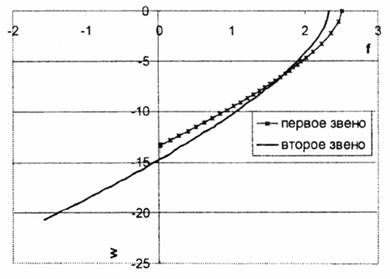
Позволяет синхронизировать различные движения, представив их параметрическими сплайнами вида:
![]() -
кубический сплайн.
-
кубический сплайн.
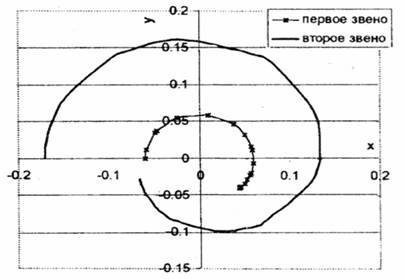
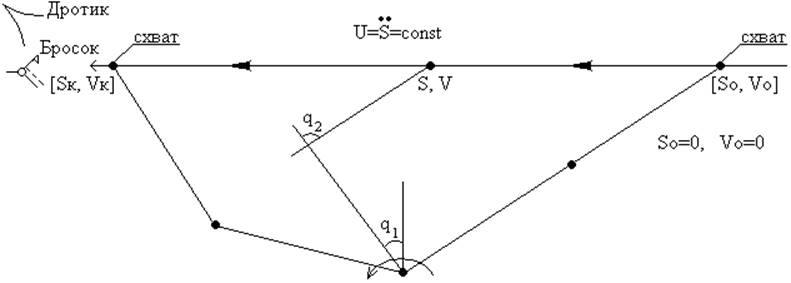
Пример целевого управления манипулятором в пространстве координат схвата («Дартс»)
|
|
J(q) – матрица Якоби q=[q1, q2] – вектор обобщённых координат |
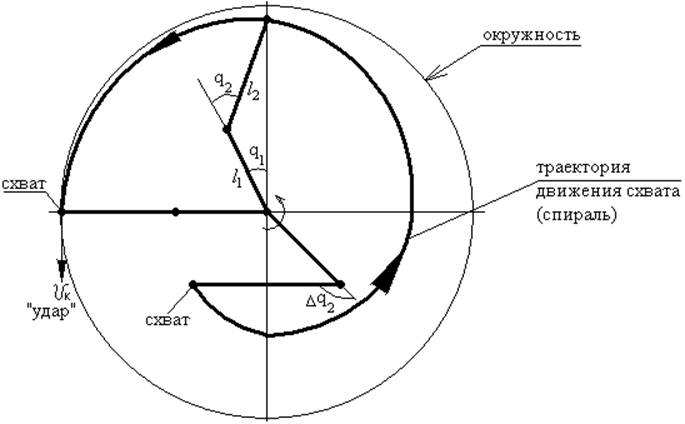
Цель управления – «удар со скоростью Vк»
|
Vк=w1к (l1+l2)+ w2к l2 |
При w2к¹0 – «хлёсткий удар»
|
|
Из условия монотонности разгона (Со³0, С1³0)
|
|
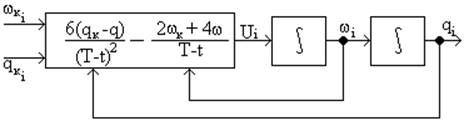
Что определяет выбор начальной точки Dqi, время разгона Т и конечные wк:
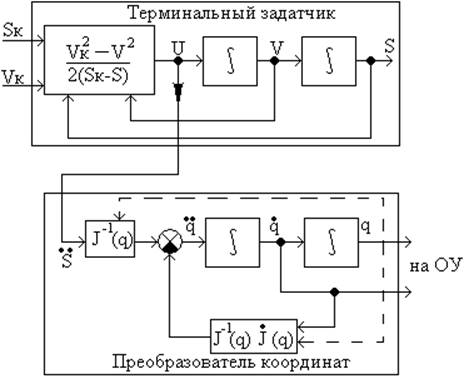
Структура системы управления (один канал)
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.