Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра автоматики и вычислительной техники
Дисциплина: компьютерные системы управления
Тема: Синтез и исследование оптимальной системы ЛК-управления в непрерывном времени
Выполнил студент гр. 5081/1
Проверил:
Санкт-Петербург
2009
1. Цель работы
Изучение методики синтеза системы оптимального терминального управления в непрерывном времени с интегральным квадратичным критерием качества, а также исследование работы системы.
2. Теоретические сведения
Описание алгоритма вычисления оптимальных коэффициентов обратной связи
В основу синтеза оптимальной ОС в данной работе положен метод итерационного решения нелинейного матричного уравнения Риккати путём сведения его к матричному линейному уравнению Ляпунова. Пусть имеется многомерный линейный стационарный объект, описываемый векторно-матричным уравнением вида:
![]() (1)
(1)
Необходимо синтезировать
управление, обеспечивающее перевод объекта из некоторого начального состояния ![]() в заданное конечное
в заданное конечное ![]() и минимизацию целевого функционала
вида
и минимизацию целевого функционала
вида
 ,
(2)
,
(2)
где Q и R – симметричные неотрицательно определённые диагональные матрицы. В теории управления эта задача известна как линейно-квадратичная (ЛК) проблема оптимального управления. Её решение позволяет определить параметры ОС (регуляторов), обеспечивающей наилучшие процессы в смысле минимального значения функционала (2).
Уравнение Риккати:
![]() ,
(3)
,
(3)
где S – квадратная положительно определённая симметричная матрица. В результате находится оптимальная матрица S* и матрицы оптимальных коэффициентов ОС K*:
![]() (4)
(4)
Оптимальное управление формируется в виде:
![]() ,
(5)
,
(5)
т.е. в форме пропорциональной ОС по всем координатам вектора состояния. Требуется решить нелинейную векторно-матричную систему вида:
 (6)
(6)
Решение системы (6) можно получить итерационным способом, предварительно преобразовав её к линейной форме.
![]()
![]()
![]()
![]() (7)
(7)
Если предполагать, что ![]() и
и ![]() известны,
то полученное уравнение (7) является линейным относительно S
и может быть решено итерационным способом.
известны,
то полученное уравнение (7) является линейным относительно S
и может быть решено итерационным способом.
Начальные значения коэффициентов K должны выбираться из условия обеспечения устойчивости замкнутой системы. Для этого в уравнение (7) необходимо ввести параметры замкнутой системы управления. Уравнение (1) перепишем в виде:
![]()
где ![]() -
матрица параметров замкнутой системы.
-
матрица параметров замкнутой системы.
![]()
В результате полученное уравнение преобразуется к уравнению Ляпунова:
![]()
Решение уравнения Ляпунова методом прямого интегрирования
Решение уравнения Ляпунова для
устойчивой матрицы ![]() имеет вид:
имеет вид:
 (8)
(8)
Численное решение уравнения (8) требует вычисления матричных экспонент, которые могут быть аппроксимированы следующим образом:
![]()
При выборе h
> 0 матрица ![]() является неособенной и
всегда существует.
является неособенной и
всегда существует.
![]()
 (9)
(9)
Если частные суммы из (9)
обозначить как ![]() , то рекуррентную форму
вычисления S можно
представить следующим образом:
, то рекуррентную форму
вычисления S можно
представить следующим образом:
 (10)
(10)
Значение h рекомендуется выбирать из условия:
![]()
где ![]() -
доминирующее собственное значение матрицы
-
доминирующее собственное значение матрицы ![]() .
.
Описанный метод численного решения уравнения Ляпунова (10) позволяет сформулировать алгоритм решения уравнения Риккати и определить матрицу оптимальных коэффициентов ОС, реализующих условия минимизации интегрального квадратичного критерия (2).
3. Экспериментальная часть
3.1. Переход от скалярной формы записи исходного уравнения к векторно-матричной форме
Уравнение объекта задано линейным дифференциальным уравнением второго порядка:
![]()
где а0, а1, а2, b – постоянные коэффициенты.
Исходные данные:

Схема набора для заданных исходных данных представлена на рис. 3.1.
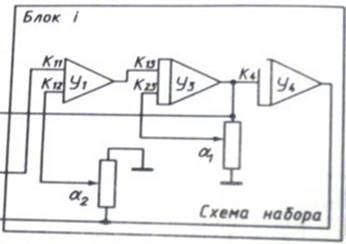
Рис. 3.1. Схема набора для заданных исходных данных.
где ![]()
![]()
![]()
3.2. Определение оптимальных коэффициентов ОС
С помощью программы cal_ric2.exe были получены коэффициенты ОС. При начальных условиях:
Матрица Q:
1.00 0.00
0.00 1.00
Скаляр R:
1.00
Начальные коэффициенты ОС K1, K2:
1.00 1.00
В таблице 3.2 приведены значения оптимальных коэффициентов в зависимости от x0.
Таблица 3.2. Значения оптимальных коэффициентов при варьировании н.у.
|
x0, В |
K1 |
K2 |
J |
|
1 |
0.61808 |
0.89594 |
299.9125 |
|
3 |
0.61808 |
0.89594 |
2699.9834 |
Очевидно, что значения оптимальных коэффициентов не зависят от начальных условий.
3.2.1. Зависимость оптимальных коэффициентов ОС от отношения параметров
критерия J Q/R
В таблице 3.2.1 приведены значения оптимальных коэффициентов ОС в зависимости от отношения параметров критерия J Q/R (отношение веса координат к весу управления). В таблице в столбце Q приведено значение диагональных элементов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.