
Рис.1.1. Объект, управляемый МПС
МПС (рис.1.2) состоит из микропроцессорного модуля (МПМ), оперативного и постоянного запоминающих устройств (ОЗУ и ПЗУ), интерфейсных устройств ввода и вывода (ИУВВ), контроллера прерываний (КП) и пульта управления (ПУ), соединенных с помощью общей шины (ОШ).
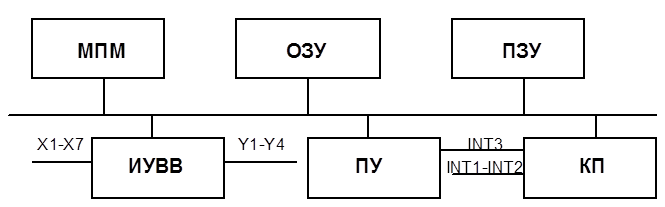
Рис.1.2. Структурная схема МПС
В курсовом проекте разрабатываются структурная и принципиальная электрическая схемы МПС и программы, обеспечивающие выполнение заданного алгоритма управления, осуществляется оценка параметров МПС.
В качестве основы для построения МПС выбран микропроцессор КР1810 ВМ88, работающий в максимальном режиме.
В МПС реализуется алгоритм, представленный на рис.1.3.
Блоком 1 выполняется начальная установка системы: программирование БИС параллельного интерфейса, контроллера прерываний и др., засылка при необходимости в выходные каналы начальных значений управляющих воздействий и т.п.
Блоком 2 реализуется задача логического управления: прием информации с двоичных датчиков Х1,...,Х4, вычисление значения булевой функции F(X1,...,X4) в соответствии с заданным выражением и выдача этого значения в качестве управляющего двоичного сигнала Y1 по соответствующему выходному каналу на ИМ.
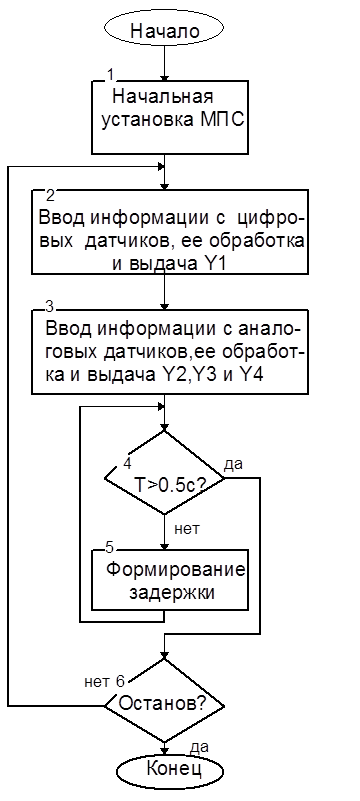
Рис. 1.3 Схема алгоритма управления объектом
Блоком 3 обеспечивается прием сигналов X5,X6,X7 с датчиков напряжения, их преобразование в цифровую форму, вычисление значений управляющих воздействий Y2-Y4. При этом Y2 и Y3 являются двоичными сигналами, а Y4 - напряжение, которое получается после преобразования цифрового кода в аналоговую форму.
Блоками 4 и 5 обеспечивается требуемое время цикла управления, приблизительно равное 0.5 с. Блоком 6 реализуется или циклический режим управления или останов МПС в соответствии с командами, поступающими от оператора с ПУ.
МПС опрашивает двоичные датчики и вычисляет булеву функцию F(X1,...,X4)=X1+X2*(X3+X4). При единичном значении функции МПС вырабатывает выходной сигнал Y1=1 длительностью Т1=70 мс. Через Т1 после выдачи единичного сигнала Y1 необходимо выработать нулевой сигнал Y1.
Напряжения X5 и X6 преобразуются в цифровую форму с помощью АЦП. С выхода АЦП цифровые коды поступают на обработку. Код уставки К задается с ПУ оператором.
Вид реализуемой функции: Q2=F(N5,N6,K)=макс(N5+N6,K). Полученное значение функции Q2 сравнивается с константой Q0, хранящейся в ПЗУ. В зависимости от результатов сравнения (рис.1.4) МПС вырабатывает двоичные управляющие воздействия Y2 или Y3 длительностью Т2=60 мс или Т3=200 мс соответственно.
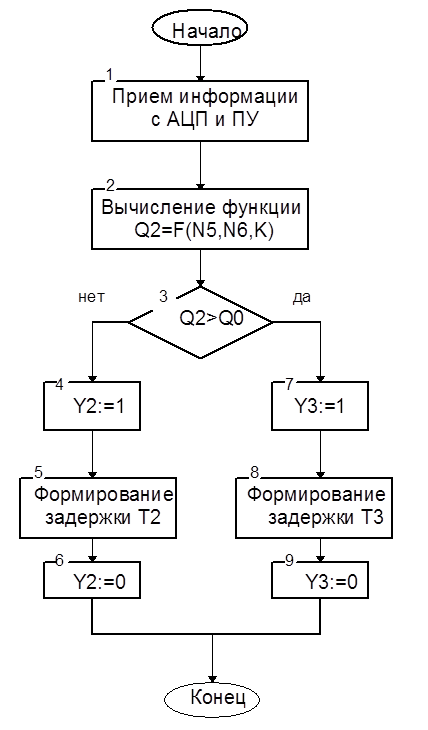
Рис. 1.4 Схема алгоритма выработки сигналов Y2 и Y3
Напряжение Х7 преобразуется с помощью АЦП в цифровую форму N7, затем вычисляется функция Q4=A0+A1*N7, где А0 и А1 - коэффициенты, хранящиеся в ПЗУ МПС.
Предполагается, что значения всех исходных величин меньше 1 и представляются в форме с фиксированной запятой. Значение коэффициента А1 равно 0.25, а значение А0=0.17. Значение Q4 с помощью ЦАП преобразуется в напряжение Y4, которое далее поступает на ИМ. Предполагается, что ЦАП и АЦП входят в состав ИУВВ. Погрешность обработки аналоговых сигналов не более 1%.
С помощью ПУ оператор получает возможность управлять работой МПС: запускать ее и останавливать, выдавать значения некоторых уставок (констант), снимать информацию о состоянии объекта и т.п. Пульт управления должен содержать следующие элементы:
1. Клавиатуру с числом клавиш 25, включая 16 клавиш шестнадцатиричного кода (0-F) и три командные клавиши: УСТАВКА (INSTALL), ВЫВОД (OUTPUT) и ОСТАНОВ (BREAK);
2. Кнопку СБРОС (RESET);
3. Светодиодные индикаторы для отбражения сигналов X1,...,X4 и значения Q4 в десятичной системе счисления.
4. Узел аварийной сигнализации - звуковой с частотой 500 Гц.
МПС обрабатывает прерывания от аварийного датчика INT1, при отказе источника питания INT2 и от оператора INT3 (высший приоритет имеет прерывание INT1, низший - INT3). При обработке указанных прерываний МПС должна выполнить следующие действия:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.