МПС должна принимать информацию об объекте управления от аналоговых и цифровых датчиков, вырабатывать управляющие воздействия в соответствии с законом управления и подавать их на исполнительные механизмы. МПС также должна обрабатывать сигналы прерывания от датчика аварийной ситуации и от датчика напряжения питания, поступающие с объекта управления.
Целью курсового проектирования является приобретение навыков разработки микропроцессорных систем (МПС). В данном случае необходимо разработать МПС для управления некоторым объектом. Структурная схема взаимодействия МПС и объекта, управляемого МПС, представлена на рис. 1.
Основой для выполнения проектирования являются методические указания к курсовому проекту [5].
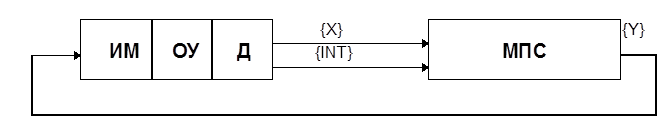
МПС принимает информацию {X} об объекте управления (ОУ) от аналоговых и цифровых датчиков, вырабатывает управляющие воздействия {Y} в соответствии с законом управления и подает их на исполнительные механизмы (ИМ). В МПС поступают от ОУ также сигналы прерывания {INT} от датчика аварийной ситуации и от датчика напряжения питания.
|
Рис. 1. Объект, управляемый МПС. |
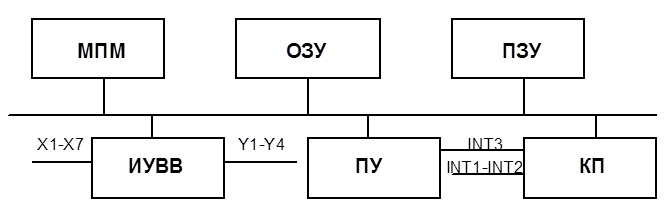
МПС (рис.2) состоит из микропроцессорного модуля (МПМ), оперативного и постоянного запоминающих устройств (ОЗУ и ПЗУ), интерфейсных устройств ввода и вывода (ИУВВ), АЦП и ЦАП (так как часть входных и выходных сигналов МПС имеют аналоговую форму), контроллера прерываний (КП) и пульта управления (ПУ), соединенных с помощью общей шины (ОШ).
|
Рис. 2. Структурная схема МПС. |
В курсовом проекте разрабатываются структурная и принципиальная электрическая схемы МПС и программы, обеспечивающие выполнение заданного алгоритма управления, осуществляется оценка параметров МПС.
Основу МПС составляет микропроцессор КР1810ВМ86, работающий в максимальном режиме.
В качестве серии для реализации схем управления будет использоваться серия ТТЛ - элементов КР1533. Эта серия содержит все основные логические схемы, которые могут понадобиться при проектировании. Эта серия хорошо изучена, т.к. использовалась в предыдущих работах, кроме того, имеются исчерпывающие справочные данные по этой серии [2].
Данная МПС используется для управления некоторым объектом, часть входных и выходных сигналов МПС имеют аналоговую форму. Следовательно, в МПС будут использоваться аналогово-цифровые и цифро-аналоговые преобразователи.
Значения всех исходных величин меньше 1 и представляются в форме с фиксированной запятой. Погрешность обработки аналоговых сигналов не более 1%.
Пульт управления МПС позволяет, управлять работой МПС: запускать ее и останавливать, выдавать значения некоторых уставок (констант), снимать информацию о состоянии объекта и т.п. Пульт управления должен содержать следующие элементы:
· Клавиатуру с числом клавиш 19, включая 16 клавиш шестнадцатеричного кода (0-F) и три командные клавиши: УСТАВКА (INSTALL), ВЫВОД (OUTPUT) и ОСТАНОВ (BREAK);
· Кнопку СБРОС (RESET);
· Светодиодные индикаторы для отображения сигналов X1,...,X4 и значения Q4 в десятичной системе счисления.
· Узел аварийной сигнализации - световой с частотой 2 Гц.
МПС обрабатывает прерывания от аварийного датчика INT1, при отказе источника питания INT2 и от оператора INT3 (высший приоритет имеет прерывание INT1, низший - INT3). При обработке указанных прерываний МПС должна выполнить следующие действия:
1. От аварийного датчика:
a) включить на ПУ аварийную сигнализацию;
b) выдать на индикацию значения сигналов X1,...,X4 и цифровой код Q4;
c) перевести МПС в состояние ожидания. Выход МПС из состояния ожидания обеспечивается сигналом СБРОС.
2. При отказе источника питания: записать в энергонезависимое ОЗУ текущие значения содержимого регистров микропроцессора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.