






Московский Государственный Технический Университет
имени Н. Э. Баумана
Фундаментальные исследования с использованием математической модели и цифрового моделирования микропроцессорного привода.
Фундаментальные исследования с использованием математической модели и цифрового моделирования микропроцессорного привода.
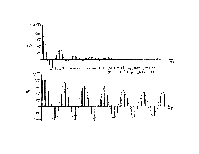
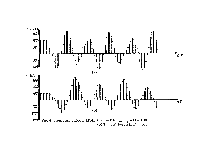
По дифференциальным уравнениям с импульсными элементами разработана математическая модель микропроцессорного привода. На основании применения z – преобразования найдены основные передаточные функции привода по управляющему сигналу. Для отображения переходных процессов привода на различные управляющие сигналы было проведено цифровое моделирование
Фундаментальные исследования цифровых электроприводов (ЦЭП) представляют большие сложности, так как работа ЦЭП описывается системой дифференциальных уравнений с импульсными элементами. В структурных и математических моделях появляются ключевые элементы, которые работают в импульсном режиме, обеспечивая дискретизацию рабочего сигнала, преобразуя его в амплитудно-импульсную модуляцию.
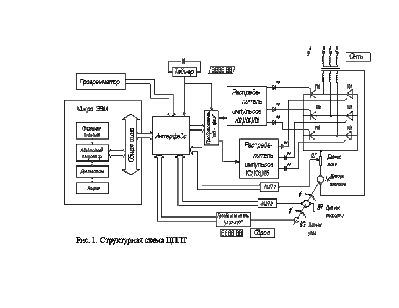
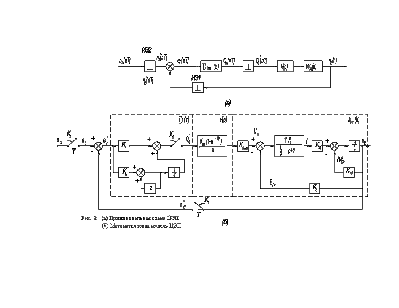
На рис. 1 представлена функциональная схема ЦЭП, которая представляет собой трехконтурную цифровую следящую систему автоматического регулирования. Контуры отрицательной обратной связи (ОС) замыкаются с помощью датчиков тока, частоты вращения и угла поворота вала двигателя через микро-ЭВМ.
ЦЭП состоит из микро-ЭВМ, интерфейса, преобразователя "код-фаза", распределителей импульсов, блока тиристоров, двигателя постоянного тока, тахогенератора, датчиков тока, частоты вращения и угла поворота вала двигателя, двух АЦП, преобразователя "угол-код", таймера программатора.
Микро-ЭВМ выполняет функцию обработки сигналов с датчиков ОС, осуществляет заданную программу движения Адаптивный перестраиваемый регулятор, который реализуется программным путём, обеспечивает оптимальные параметры работы ЦЭП.
Кроме того, микро-ЭВМ осуществляет диагностику работы блоков и устройств ЦЭП. Канал связи с внешними устройствами в микро-ЭВМ представляет собой общую шину.
Интерфейс обеспечивает связь внешних устройств с микро-ЭВМ, дешифрирует адреса датчиков ОС и формирует ответные служебные сигналы. Дешифрированные сигналы соответствующих разрядов используются в качестве сигналов адреса блоков ЦЭП. Интерфейс имеет два канала для передачи от микро-ЭВМ во внешние устройства и четыре канала приема данных с внешних устройств. По командам ВВОД или ВЫВОД к общей шине канала микро-ЭВМ подключаются те или иные внешние устройства.
Преобразователь "угол-код" осуществляет измерение угла поворота вала двигателя в параллельном двоичном коде. По запросу от микро-ЭВМ информация передается в канал приёма данных интерфейса.
Преобразователь "код-фаза" преобразует параллельный двоичный код на выходе микро-ЭВМ в управляющие импульсы, фазовый сдвиг которых прямо пропорционален двоичному коду. Распределители импульсов в определенной последовательности обеспечивают на управляющих электродах тиристоров VD1...VD6 управляющие импульсы.
Таймер, в основу которого входит кварцевый генератор, выдает высокостабильную частоту временных сигналов для синхронизации работы всех узлов ЦЭП.
АЦП служат для преобразования аналоговых сигналов с датчика тока и тахогенератора в параллельный двоичный код и передачи этих сигналов в микроЭВМ.
Блок тиристоров состоит из тиристоров и трехфазного трансформатора, вторичные обмотки которого соединяются в трехфазную звезду с нулевым выводом.
Трансформатор согласует напряжение сети с напряжением питания электродвигателя и ограничивает токи коротких замыканий обмотки якоря. Электродвигатель одним концом подсоединяется к нулевому выводу вторичных обмоток трансформатора, а другим - к инверторной и выпрямительной группам тиристоров.
Датчик тока представляет собой измерительное устройство резистивного типа.
Тахогенератор (BR)- этo элемент систем автоматического регулирования, входным параметром для которого служит частота вращения вала электродвигателя, а выходным – напряжение, прямо пропорциональное частоте вращения.
Датчик обратной связи (BG) ВE - I78 импульсного типа включает в себя три основные части: механическую, оптическую и электронную
Механическая часть обеспечивает точное вращение входного вала преобразователя относительно корпуса.
Оптическая часть содержит светодиод, линзу, растровую индикаторную пластинку и растровый диск, а также фотодиоды.
Электронная часть состоит из усилителей, на входы которых подаются сигналы от фотодиодов для компенсации постоянной составляющей сигнала. Эти сигналы имеют прямоугольную форму, их амплитуды смещены относительно друг друга на 90°. Частота следования импульсов пропорциональна измеряемой скорости вращения, а число импульсов - углу поворота вала двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.