Проанализируем требования, предъявляемые к механизму, и попытаемся на основании анализа подобрать систему электропривода, которая позволит наиболее дешево и надежно обеспечить эти требования.
Рассмотрим ряд систем:
Асинхронный двигатель с фазным ротором, со ступенчатым реостатным регулированием. Это система проста, надежна в эксплуатации и обслуживании, а потому дешевая. Но данная система не обеспечивает необходимый диапазон регулирования скорости. Диапазон регулирования данной системы – 3-5, при необходимом 20. Таким же недостатком обладают следующие системы: двигатель постоянного тока последовательного возбуждения с реостатным регулированием, тиристорный преобразователь – асинхронный двигатель.
Рассмотрим систему «тиристорный преобразователь - двигатель». Такая система позволяет получить глубокий диапазон регулирования скорости с достаточной точностью и применяется для электроприводов различной мощности. Она обладает высоким КПД и позволяет получить плавное протекание переходных процессов. Недостатком данной системы является то, что она значительно дороже вышеуказанных систем. Но, несмотря на это, в данном механизме необходимо применить такую систему, так как она удовлетворяет требованиям по диапазону регулирования и точности.
Выбираем двигатель по требуемой мощности и частоте вращения.
По справочнику [2] выбираем двигатель 2ПО200МУХЛ4. Номинальные данные двигателя приведены в табл. 2.1
Таблица 2.1
Данные выбранного двигателя
|
Параметр |
Значение |
|
Номинальная мощность, PН |
14 кВт |
|
Номинальное напряжение якоря, UЯН |
220 В |
|
Номинальная частота вращения, nн |
1500 об/мин |
|
Максимальная частота вращения, nmax |
3500 об/мин |
|
Сопротивление обмотки якоря, Rя |
0,071 Ом |
|
Сопротивление обмотки добавочных полюсов, Rдп |
0,041 Ом |
|
Сопротивление обмотки возбуждения, Rв |
96 Ом |
|
Напряжение обмотки возбуждения, UВ |
220 |
|
Температура, для которой даны сопротивления, t |
15˚С |
|
КПД двигателя, η |
0,88 |
|
Момент инерции двигателя, Jя |
0,25 кг·м2 |
Ток якоря:
 А
А
Сопротивление обмотки якоря при рабочей температуре:
![]() Ом,
Ом,
Сопротивление обмотки возбуждения при рабочей температуре:
![]() Ом,
Ом,
Номинальный поток возбуждения

где
Номинальный электромагнитный момент двигателя:
![]()
Индуктивность якорной обмотки:

где ![]() -
для компенсированных машин;
-
для компенсированных машин;
![]() -
число пар
полюсов
ЭД
-
число пар
полюсов
ЭД
Для питания силовой части электропривода выбираем трансформатор типа ТСП-25/0,7-УХЛ4, данные которого приводим в табл.3.1
Таблица 3.1
|
Параметр |
Значение |
||
|
Тип трансформатора |
ТСП-25/0,7 |
||
|
Номинальная мощность |
Sн = 29,1 кВ·А |
||
|
Сетевая обмотка |
напряжение |
U1Н = 380 В |
|
|
Вентильная обмотка |
напряжение |
U2Н = 205 В |
|
|
ток |
I2Н = 82 А |
||
|
Преобразователь |
напряжение |
Uном = 230 В |
|
|
ток |
Iном = 100 А |
||
|
Потери |
холостого хода |
Рхх=210 Вт |
|
|
короткого замыкания |
Ркз=1100 Вт |
||
|
Напряжение короткого замыкания |
Uкз=5,5% |
||
|
Ток холостого хода |
Iхх=8 |
||
Рассчитаем параметры трансформатора:
Активное сопротивление обмотки трансформатора:
 Ом где
Ом где ![]() -
число фаз трансформатора.
-
число фаз трансформатора.
Полное сопротивление обмотки трансформатора:
![]()
 Ом
Ом
Индуктивное сопротивление обмотки трансформатора:
![]() Ом
Ом
Индуктивность обмотки при частоте напряжения сети:

Коммутационное сопротивление:

где, ![]() -
для мостовой схемы преобразователя.
-
для мостовой схемы преобразователя.
Суммарные сопротивление и индуктивность якорной цепи:
![]() Ом
Ом
![]() мГн
мГн
Определим некоторые параметры электропривода:
Момент инерции системы:

Постоянная якорной цепи:
Электромагнитная постоянная времени:
Электромеханическая постоянная времени
Для управления двигателем постоянного тока на практике используются комплектные тиристорные электропривода различных моделей. Выбираем комплектный электропривод ЭПУ1Д-2-40-27ДУХЛ4
Это реверсивный двухзонный быстродействующий электропривод постоянного тока для приводов подач.
Напряжение питания силовой цепи Uпит=380В;
Частота питающей сети f=50Гц;
Номинальный ток Iн=100А;
Номинальное напряжение Uном=230В
В соответствии с требованиями к электроприводу принимаем двухзонную САУ скорости подчиненного регулирования (рис.4.1).
Рассчитаем постоянные времени, коэффициенты передачи обратных связей и узлов, входящих в схему контуров регулирования.
Постоянная времени преобразователя якорной цепи:
где р = 6 – пульсность трехфазной мостовой схемы выпрямления
Коэффициент передачи преобразователя якорного канала:
где ![]() --
ЭДС холостого хода
--
ЭДС холостого хода
Uу = 10 В – напряжение управления

Коэффициент обратной связи по току якоря:
где UЗТН = 5В – напряжение задания тока
Коэффициент обратной связи по скорости:
где UЗС = 5В – напряжение задания скорости;
ωн = 157 рад/с – номинальная скорость двигателя
Коэффициент передачи преобразователя канала возбуждения:
![]()
где 
Постоянная времени для ТПВ:
 мс.
мс.
Коэффициент обратной связи тока возбуждения:

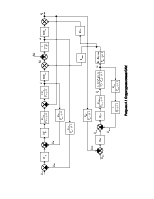
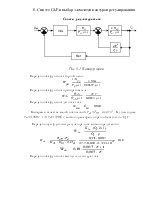
Cинтез регулятора тока
Рис. 5.1 Контур тока
Передаточная функция якорной цепи:
Передаточная функция преобразователя:
Передаточная функция датчика тока:
![]()
Выберем в качестве малой постоянной ТμI =TТП =3.33∙10-3 . В этом случае
Тм =0,069 c > 20∙ТμI =0,066 c, можно пренебречь обратной связью по ЭДС.
Передаточную функцию регулятора тока можно представить:


Передаточная функция замкнутого контура тока
![]()
т.к.
![]() , можно пренебречь.
, можно пренебречь.
Рис. 5.2 Контур скорости
Малая постоянная контура скорости:
![]()
Контур тока можно представить апериодическим звеном
Тогда
При настройке на ТО необходим П – регулятор:

Синтез регулятора тока возбуждения
Рис. 5.3 Контур тока возбуждения
Из графика зависимости ![]() , получим электромагнитную постоянную
времени цепи возбуждения:
, получим электромагнитную постоянную
времени цепи возбуждения:
![]() с
с
Для вихревых токов:
![]() с
с
За малую постоянную времени контура потока принимаем:
![]()
Постоянная времени регулятора:
![]()
Постоянная времени фильтра:
Коэффициент передачи регулятора:

Передаточная функция регулятора тока возбуждения:

Синтез регулятораЭДС
Рис. 5.4 Контур ЭДС

Малую постоянную времени определяем по формуле:
![]()
где ![]() -- постоянная времени датчика напряжения.
-- постоянная времени датчика напряжения.
Постоянная времени регулятора:

где 
Передаточная функция регулятора ЭДС:
Рис 5.5 Регулятор тока, синтезированный на ТО.
![]()
Примем Rот=11кОм, тогда Rзт=220кОм
тогда Сот=0.75мкФ
Рис 5.6 Регулятор скорости, синтезированный на СО.
![]()
Примем Rос=680кОм, тогда Rзс=13кОм
тогда Сос=39мкФ
Рис 5.7 Регулятор положения, синтезированный на ТО.
Пусть Rоп = 10кОм , тогда Rзп=11кОм
Рис. 6.1 Структурная схема контура скорости
Рис. 6.2 Преобразованная к статическому режиму структурная схема контура скорости
Статическая характеристика контура скорости по возмущению:
Статическая ошибка по возмущению:

7. Анализ динамики ЭП
Анализы динамики системы автоматического управления электроприводом шпинделя горизонтально-расточного станка заключается в расчетах переходных процессов основных динамических показателей системы.
Расчет переходных процессов произведем в программе Matlab в приложении Simulink.
Построим переходные процессы для тока якоря двигателя (Iя), угловой скорости (ω), тока возбуждения (Iв) и ЭДС якоря (Ея=кФн∙ω).
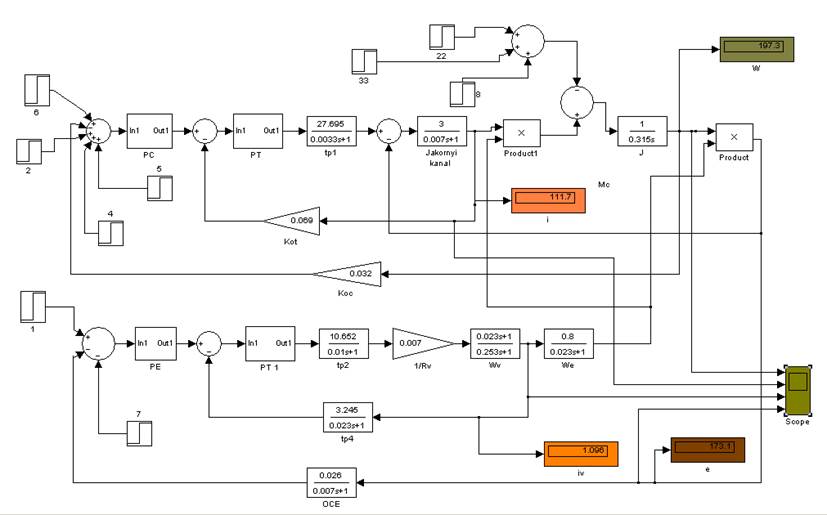
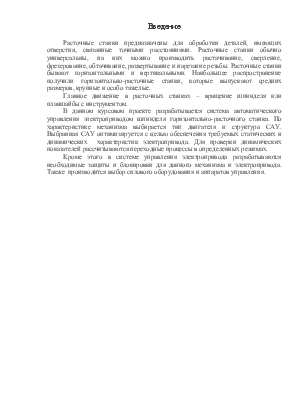
Рис.7.1. Фрагмент программы Matlab: структурная схема САУ приводом шпинделя горизонтально-расточного станка.
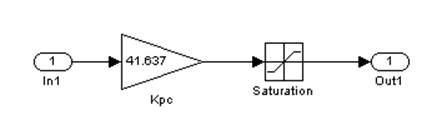
Рис.7.2. Фрагмент программы Matlab: регулятор скорости, синтезированный
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.