Билет 1
1. Система ЧПУ с преобразователем код-напряжение.
Функциональная
схема обеспечивает перемещение S рабочего органа (РО)
задаваемое в виде последовательности импульсов, поступающих от интерполятора с
частотой fЗ. Фактическое
перемещение РО фиксируется реверсивным импульсным датчиком перемещения ИДП,
имеющим 2 чувствительных элемента, последовательность работы которых зависит от
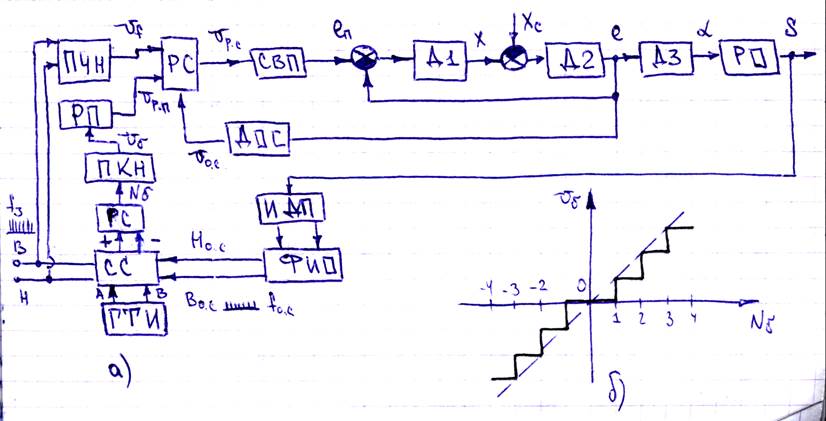
направления движения. Сигналы получаемые от ИДН преобразуются в формирователе
импульсов отработки в последовательность импульсов обратной связи при заданном
направлении движения, направление вперед импульсы программы по входу В подаются
на схему синхронизации СС при этом импульсы обратной связи поступают на схему
синхронизации через вход Во.с. После прохождения схемы синхронизации
импульсы задания поступают на вход сложения (+) реверсивного счетчика РС, а
импульсы обратной связи на вход вычитания (-). В результате в реверсивном
счетчике образуется код рассогласования ![]() ,выражающий
разность поступивших в счетчик чисел импульсов задания и обработки. Аналогично
обрабатывается код рассогласования при заданном движении назад.
,выражающий
разность поступивших в счетчик чисел импульсов задания и обработки. Аналогично
обрабатывается код рассогласования при заданном движении назад.
ДЗ – генератор тактовых импульсов
ПКН – преобразователь код-напряжение
РП – регулятор положения
ПЧН – преобразователь частота напряжение
Блок системы синхронизации
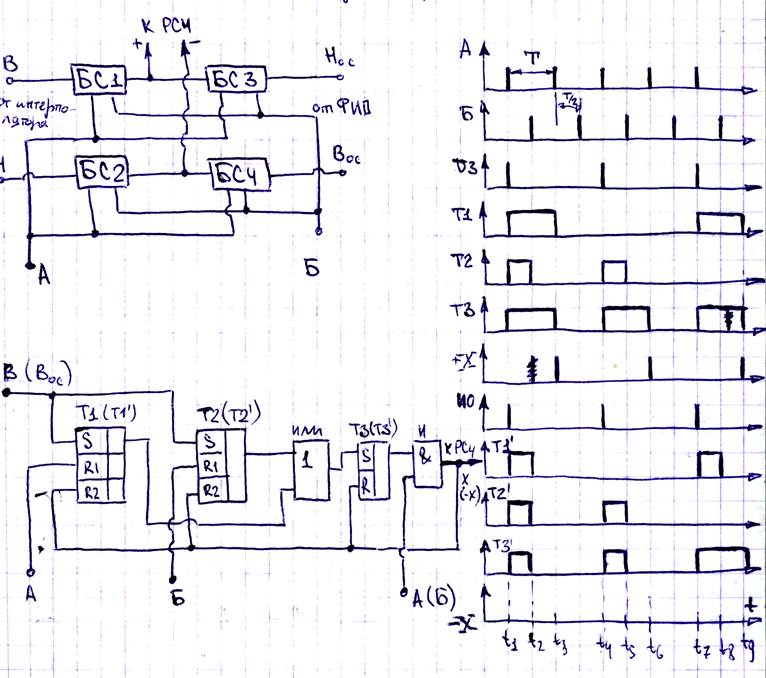
Схема синхронизации (СС) состоит из блоков синхронизации БС1-БС4, управляемых двумя последовательностями тактовых импульсов А и В, получаемых от генератора тактовых импульсов.
При движении вперед импульсы задания (ИЗ) от интерполятора проходят к реверсивному счетчику через блок БС1, а импульсы отработки от ФИО через блок БС4. На рисунке б) показана схема блока БС1, схема блока БС4 полностью аналогична ей, но в ней должны быть приняты обозначения, указанные в скобках. Если на рисунке б) входы В(Во.с.) заменить на входы «назад», получим схему блоков БС2, БС3.
На рисунке в) даны временные диаграммы для блоков БС1, БС4. При одновременном появлении ИЗ входе В и импульса отработки ИО на входе (Во.с.) в момент времени t1, триггеры Т1, Т2, Т1`, Т2`, установятся в единичное состояние. Выходные сигналы с триггеров Т1, Т2 проходят через схему ИЛИ и устанавливают в един. состояние триггер Т3 блока БС1. Аналогично в единичное состояние устанавливается триггер Т3` блока БС4. В результате схемы И в обоих блоках БС1 и БС4 оказываются открытыми сигналами с триггеров Т3 и Т3`.
Серии
тактовых импульсов А и В поступают от ГТИ с частотой  значительно
превышающей максимальную частоту импульсов задания fЗ
и импульсов отработки fо.с.
значительно
превышающей максимальную частоту импульсов задания fЗ
и импульсов отработки fо.с.
Серии
импульсов А и В сдвинуты относительно друг друга на ![]() .
.
В рассмотренном случае в момент t2 появляются импульсы серии В и на выходах блока БС4 появится сигнал –Х, поступающий на вход вычитания реверсивного счетчика РС. Одновременно по цепи обратной связи Т1`, Т2`, Т3` будут переброшены в нулевое состояние при появлении импульса серии В. Но триггеры Т1 и Т3 остаются в единичном положении. Когда в момент времени t3, появляется ближайший импульс серии А, на выходе БС1 сформируется импульс Х, поступающий на вход сложения реверсивного счетчика. Таким образом одновременно возникшие на входах СС импульсы задания и отработки поступают на соответствующие входы реверсивного счетчика.
Преобразователь
код-напряжение переводит код рассогласования реверсивного счетчика в аналоговый
сигнал ![]() в соответствии с характеристикой,
приведенной рядом с функциональной схемой.
в соответствии с характеристикой,
приведенной рядом с функциональной схемой.
В простейшем случаи при П - регуляторе положения РП и скорости РС выходное напряжение регулятора может быть представлена в виде:


![]() – коэффициент
– коэффициент
Код рассогласования реверсивного счетчика выражает разность заданного и фактического перемещения рабочего органа.
![]()
Постоянная
времени ТК подбирается с таким расчетом, чтобы частично
компенсировать инерционность объекта регулирования. Напряжение Uр.с. определяет ЭДС СВП (еп). ЭД
на функциональной схеме представлен элементами Д1, Д2 и Д3 выходными сигналами
которых является соответствующий сигнал пропорциональный току якоря (Х), ЭДС
двигателя е = сω и угол поворота вала ЭД ![]() .
И сигнал Хс, сигнал пропорциональный статическому току нагрузки. Если для
упрощения пренебречь возмущением Хс и принять СПВ с коэффициентом
.
И сигнал Хс, сигнал пропорциональный статическому току нагрузки. Если для
упрощения пренебречь возмущением Хс и принять СПВ с коэффициентом ![]() безынерционным , то операторное
уравнение примет вид:
безынерционным , то операторное
уравнение примет вид:

![]()

![]() – электромагнитная и
электромеханическая постоянная привода.
– электромагнитная и
электромеханическая постоянная привода.
Подбирая постоянную времени Тк можно свести полученное уравнение к системе второго порядка.
1.4. ПУТИ ЭНЕРГОСБЕРЕЖЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Прежде чем перейти к детальному рассмотрению конкретных систем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.