














Тульский государственный университет
Контрольно-курсовая работа по
«Теории автоматического управления».
Выполнил студент гр. .
Научный руководитель: доцент
Тула, 2004
Формулировка задания по контрольно-курсовой работе.
1. По математической модели, заданной системой дифференциальных уравнений, построить структурную схему системы.
2. Построить граф системы.
3. Задать переменные состояния и определить вектор входных воздействий объекта управления.
4. Записать уравнения объекта управления в векторно-матричной форме, определить коэффициенты матриц А и В.
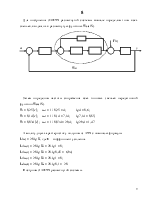
5. На основе принципа регулирования по отклонению выделить в системе регулятор, элемент сравнения, датчик обратной связи и объект управления.
6. Составить функциональную схему замкнутой системы и определить, какие принципы управления используются в исследуемой системе автоматики.
7. Определить вид типового регулятора используемого в системе.
8. Построить ЛАФЧХ разомкнутой системы. Определить низкочастотную, среднечастотную и высокочастотные области исследуемой системы. Оценить воспроизведение системой входного гармонического сигнала для выбранных нами значений низкой, средней и высокой частоты (d%).
9. Определить частоту среза и критическую частоту системы, полосу пропускания системы, запасы устойчивости по фазе и амплитуде.
10. Определить передаточные функции разомкнутой и замкнутой системы по входному воздействию, возмущению и ошибке.
11. Рассчитать по косвенным оценкам качества предполагаемые значения времени регулирования, перерегулирования и статической ошибки в исследуемой системе (tp, s% и D).
12. Оценить статическую точность системы при отсутствии и действии возмущения.
13. Методом моделирования построить переходный процесс в замкнутой системе. Оценить точность (s% и D) и быстродействие (tp) в исследуемой системе при отсутствии и действия возмущения. Сопоставить фактические значения tp, s% и D с результатами косвенной оценки в пункте 11 и сделать выводы.
14. Заменить исходный регулятор системы на пропорциональный с коэффициентом передачи рассчитанным из условий обеспечения устойчивости.
15. Рассчитать момент трогания системы с пропорциональным регулятором (время начала движения) при заданной величине возмущающего воздействия.
Математическая модель системы автоматики.
![]() dl/dt = k1×(u
- a1×l - y)
dl/dt = k1×(u
- a1×l - y)
dr/dt = k2/T×(l + k0×g – a23×z – a12×y – 1/k2×r)
dz/dt = r – a2×z
dy/dt = k4×z – a3×k4 ×y – k3×F(t)
В математической модели используются обозначения:
u(t) – входной полезный сигнал на объект управления,
y(t) - выходной сигнал,
F(t) – возмущающее воздействие,
Ki – коэффициенты усиления,
ai – коэффициенты обратных связей.
Параметры математической модели:
k0 = 0; a1 = 1;
k1 = 4; a2 = 0.5;
k2 = 2.5; a3 = 0;
k3 = 0.1; a12 = 0;
T = 0.03; a23 = 2.
![]() dl/dt = 4×(u - l - y)
dl/dt = 4×(u - l - y)
dr/dt = 2,5/0,03×(l + 0×g – 2×z – 0×y – 1/2,5×r)
dz/dt = r – 0,5×z
dy/dt = 0,1×z – 0×0,1×y – 0,1×F(t)
1
Построим структурную схему исследуемой системы. Для этого в исходных дифференциальных уравнениях объекта заменим символ дифференцирования d/dt на оператор Лапласа S, определим в каждом уравнении входные и выходные величины, составим передаточные функции блоков.
1) sl = 4×u – 4×l - 4×y
![]() l×(s + 4) = 4×(u – y)
l×(s + 4) = 4×(u – y)
a
W(s) = l/a = 4 / (s + 4) = 1 / (0,25×s + 1) – апериодическое звено 1-го порядка.
2) sr = 83,3×l - 166,6×z – 33,32×r
![]() r×(s + 33,32) = 83,3×(l -
2×z)
r×(s + 33,32) = 83,3×(l -
2×z)
b
W(s) = r / b = 83,3 / (s + 33,32) = 2,5 / (0,03×s + 1) - апериодическое звено 1-го порядка.
3) sz = r – 0,5×z
z×(s + 0,5) = r
W(s) = z / r = 1 / (s+ 0,5) = 2 / (2×s + 1) - апериодическое звено 1-го порядка.
![]() 4) sy = 0,1×z – 0×0,1×y – 0,1×F(t) = 0,1×(z – F(t))
4) sy = 0,1×z – 0×0,1×y – 0,1×F(t) = 0,1×(z – F(t))
c
W(s) = y / c = 0,1 / s – интегрирующее звено.
 u a
u a
a = u – y
y
 z
z
b = l - 2×z
l b
 F(t)
F(t)
c = z – F(t) z c
z
a l b r z c y
y
2
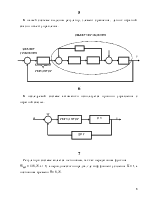
 Составим орграф Мейсона системы. В этом графе переменные состояния должны быть
вершинами, а на дугах отражают операции которые нужно выполнить над одной
переменной состояния, чтобы получить другую, то есть передаточную функцию W(s).
Составим орграф Мейсона системы. В этом графе переменные состояния должны быть
вершинами, а на дугах отражают операции которые нужно выполнить над одной
переменной состояния, чтобы получить другую, то есть передаточную функцию W(s).uuu
3
Для представления уравнений объекта управления в переменных состояниях необходимо их переименовать в переменные xi, где i = 1, n (n – порядок дифференциальных уравнений, описывающий объект управления). Уравнение объекта в переменных состояниях имеет вид: x = A×x + B×U.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.