![]() - ограничение приближения частей
рабочего органа к сооружениям около пути;
- ограничение приближения частей
рабочего органа к сооружениям около пути;
 - смещение ЩОУ в кривых
относительно пути (параметры lМ и n см. рисунок
2; R=1200м –
радиус кривой, в которой движется машина).
- смещение ЩОУ в кривых
относительно пути (параметры lМ и n см. рисунок
2; R=1200м –
радиус кривой, в которой движется машина).

![]()
Величина lнг определяется по зависимости:
![]() ,
(29)
,
(29)
где ВМ=2050мм – расстояние от оси пути до оси междупутья.
![]()
Таким образом, ЩОУ не должно превышать по ширине 3850мм.
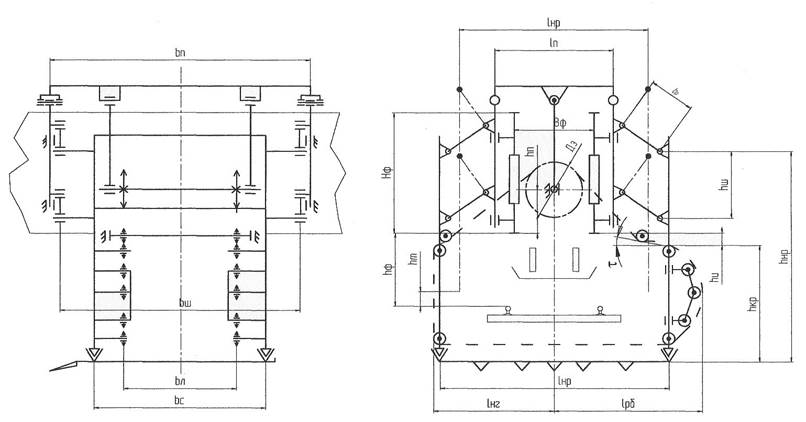 Рисунок 10 –
Компоновка щебнеочистительного устройства.
Рисунок 10 –
Компоновка щебнеочистительного устройства.
Расположение ведущего вала hп и максимально возможный диаметр ведущих звездочек D3 (влияет на переход машины в рабочее и транспортное положения, а также на глубину очистки):
![]() , (30)
, (30)
![]() , (31)
, (31)
где Нф=1,95м – высота фермы машины (принято по прототипу );
Вф=1,2м– ширина фермы машины (расстояние между поясами рамы машины принято по прототипу).
![]()
![]()
Угол выброса щебня
лежит в пределах ![]() . Наличие этого угла
обуславливается необходимостью изменения траектории осевого потока щебня при
требуемом распределении его над рельсами.
. Наличие этого угла
обуславливается необходимостью изменения траектории осевого потока щебня при
требуемом распределении его над рельсами.
Излом трассы ленты назначаем при угле t@ 0:
![]() (32)
(32)
где ![]() - расстояние от нижнего пояса фермы
машины до УГР (принято по прототипу).
- расстояние от нижнего пояса фермы
машины до УГР (принято по прототипу).
![]()
Высота криволинейного участка:
![]() (33)
(33)
где ![]() – высота рельсошпальной решетки (по
заданному нормальному типу верхнего строения пути);
– высота рельсошпальной решетки (по
заданному нормальному типу верхнего строения пути);
![]() – высота вырезаемого слоя балласта
(рисунок 4).
– высота вырезаемого слоя балласта
(рисунок 4).
![]()
По предварительно назначенным размерам lРБ, lНГ, hИ, hП, hКР уточняем принятую конфигурацию трассы сетчатой ленты. Для этого действия разбиваем криволинейный участок трассы разна ломанные линии с постоянным или переменным радиусом вписанной окружности.
Усредненный радиус криволинейного участка:
 , (34)
где
, (34)
где![]() – стрела изгиба ленты относительно
несущей рамы.
– стрела изгиба ленты относительно
несущей рамы.
Расстояние между осями направляющих подъемной рамы:
![]() (35)
(35)
![]()
Высота рабочей части несущей рамы:
![]() (36)
(36)
![]()
Расположение рычажных шарниров:
![]() (37)
(37)
![]()
Расстояние между стойками несущей рамы:
![]() (38)
(38)
![]()
Расстояние между рычажными шарнирами подвески несущей рамы:
![]() (39)
(39)
![]()
Длина рычага принята по прототипу: lр=780мм.
На этом общая компоновка оборудования заканчивается, но в дальнейшем некоторые размеры могут уточняться и принимать отличные значения.
4. Конструирование несущей рамы.
4.1 Металлоконструкция несущей рамы.
К несущей раме крепится подрезной нож, на ней размещены: роликовая батарея и звездочки, определяющие трассу сетчатой ленты, механизм натяжения ленты, лебедки для зарядки ножа. Несущая рама воспринимает все нагрузки от подрезного ножа и передает их на ферму машины [1].
С подъемной рамой несущая рама соединена с помощью промежуточных рычагов. Перевод несущей рамы из транспортного положения в рабочее и наоборот и фиксирование ее в нужном положении производится с помощью наклонных гидроцилиндров.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.