Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
Кафедра КГМ и ТМ.
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА
|
По дисциплине __________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
Тема: Кинематическое исследование механизма .
Автор: студент гр. ГМ-99-1 _________ . (ПОДПИСЬ) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: ___________________
ПРОВЕРИЛ
Руководитель проекта доцент _________
(должность) (подпись) (Ф.И.О.)
2001г
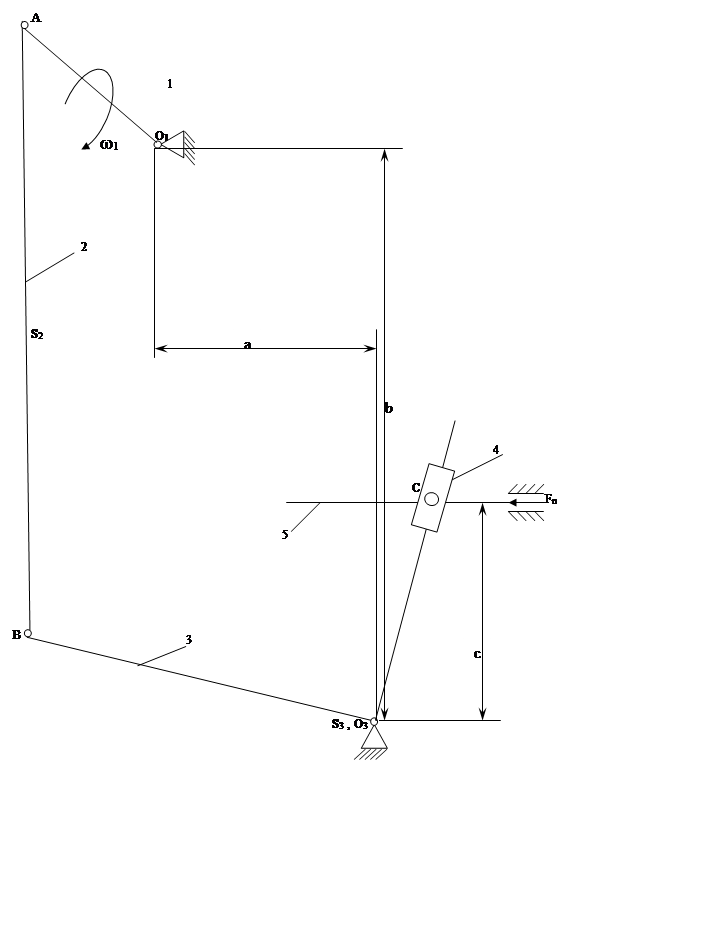
Задание к работе
Исходные данные:
|
О1А, м |
АВ, м |
О3В, м |
а, м |
b, м |
с, м |
ω, р/с |
m2,кг |
m3,кг |
m5,кг |
Js2,кгм2 |
Js3,кгм2 |
Fn, H |
JO1,кгм2 |
Jдв,кгм2 |
ω, р/с |
δ |
|
0,05 |
0,18 |
0,1 |
0,06 |
0,16 |
0,06 |
18 |
4,5 |
12 |
20 |
0,02 |
0,5 |
3500 |
2 |
0,12 |
90 |
0,05 |
![]()
1. Структурный анализ механизма
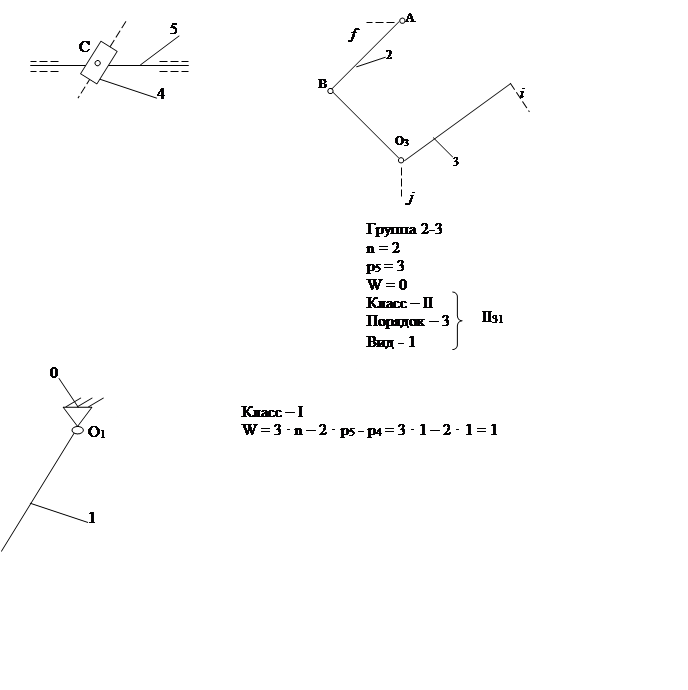
Группа 4 – 5
n = 2
p5 =3
W = 3 · n – 2 · p5 - p4 = 3 · 2 – 2 · 3 = 0

![]() Класс
– II
Класс
– II
Порядок – 2
Вид – 4
Структурная формула механизма:
2. План положений механизма
μS – масштаб плана положений м/мм.
![]() - чертёжное изображение
кривошипа, мм.
- чертёжное изображение
кривошипа, мм.
![]() = 100 мм
= 100 мм
μS = 0,0005 м/мм.
|
|
|
|
|
|
|
|
100 |
360 |
200 |
120 |
320 |
120 |
3. План скоростей механизма.
Найти
линейные скорости всех подвижных точек механизма, включая центры масс звеньев: ![]()
3.1. Масштаб планов скоростей.
μV – масштаб плана скоростей
![]()
р – полюс плана скоростей
![]() –
чертёжное изображение вектора
–
чертёжное изображение вектора ![]() , мм.
, мм.
![]() = 90 мм
= 90 мм
μV
= 0,01
3.2. Составление векторных уравнений, описывающих характер движения отдельных звеньев механизма.
Скорость точки А:
![]()
Скорость точки В:
 , где
, где ![]() - скорость относительного
движения точки В относительно точки А;
- скорость относительного
движения точки В относительно точки А;
![]() - скорость относительного
движения точки В относительно точки О3.
- скорость относительного
движения точки В относительно точки О3.
Скорость точки С – выходного звена:
![]()

![]()
![]() , где
, где ![]() - скорость относительного
движения точки С3 относительно точки О3 ;
- скорость относительного
движения точки С3 относительно точки О3 ;
![]() - скорость относительного
движения точки С5 относительно точки О3
- скорость относительного
движения точки С5 относительно точки О3
3.3. Вычисление линейных скоростей отдельных точек механизма.
Положение 2.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Результаты вычислений линейных скоростей отдельных точек механизма приведены в виде таблицы.
Таблица 1
|
|
|
|
|
|
|
|
|
|
1 |
90 |
0 |
0 |
0 |
0 |
0 |
0 |
|
2 |
90 |
85 |
27 |
51 |
18 |
6 |
18 |
|
3 |
90 |
45 |
66 |
76 |
40 |
7 |
40 |
|
4 |
90 |
34 |
104 |
96 |
62 |
8 |
62 |
|
5 |
90 |
116 |
122 |
91 |
80 |
35 |
86 |
|
6 |
90 |
128 |
64 |
46 |
53 |
47 |
72 |
|
7 |
90 |
73 |
25 |
56 |
22 |
21 |
30 |
|
8 |
90 |
28 |
72 |
80 |
53 |
38 |
66 |
|
9 |
90 |
12 |
95 |
91 |
61 |
27 |
67 |
|
10 |
90 |
26 |
88 |
88 |
58 |
8 |
60 |
|
11 |
90 |
49 |
72 |
77 |
44 |
5 |
45 |
|
12 |
90 |
75 |
40 |
60 |
25 |
7 |
25 |
|
13 |
90 |
0 |
0 |
0 |
0 |
0 |
0 |
|
14 |
90 |
0 |
0 |
0 |
0 |
0 |
0 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.