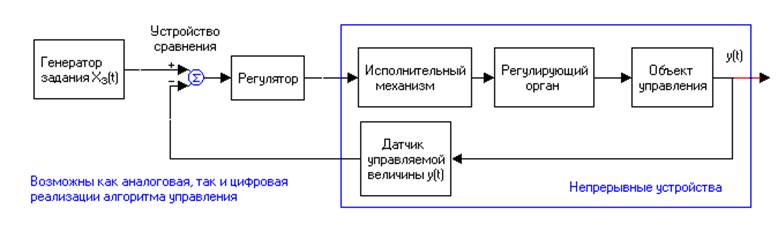
Цифровое управление (управление с помощью компьютера, цифрового процессора) непрерывным во времени объектом требует преобразования непрерывных сигналов во временную последовательность чисел, представленных в двоичном коде, выполнения математических операций над этой последовательностью в соответствии с алгоритмом управления, и обратного преобразования полученного результата в непрерывный во времени сигнал. Этот сигнал подается на исполнительный механизм и далее, через регулирующий орган, воздействует на объект управления.
Технические и физические объекты управления , исполнительные механизмы и регулирующие органы как правило, являются непрерывными во времени. Достаточно долгое время и регуляторы САР строились как непрерывные, в виде физических схем. Начиная с 70 гг. 20 века, с широким внедрением цифровой компьютерной техники появилась возможность реализации алгоритмов регулирования (например, ПИ, ПИД и др.) в цифровом виде.
Два основных достоинства цифровой реализации алгоритмов управления:
- простота изменения алгоритма управления (например, адаптации к изменению условий функционирования объекта управления) , которое может осуществляться не коррекцией физической схемы регулятора, а программно;
- возможность параллельного дистанционного компьютерного управления объектами многих локальных САР, что позволяет строить интегрированные системы автоматического управления технологическими комплексами.
Особенность применения цифровых устройств управления состоит в том, что необходимо сопряжение непрерывного объекта и дискретных (прерывных во времени и по величине) по своей природе цифровых устройств.
Алгоритм управления (ПИ, ПИД и др.) может быть реализован как в аналоговой, непрерывной схемной форме, так и в цифровом виде, посредством компьютерной программы. Во втором случае временная последовательность цифровых значений, формируемых цифровым процессором, требует преобразования в непрерывный сигнал
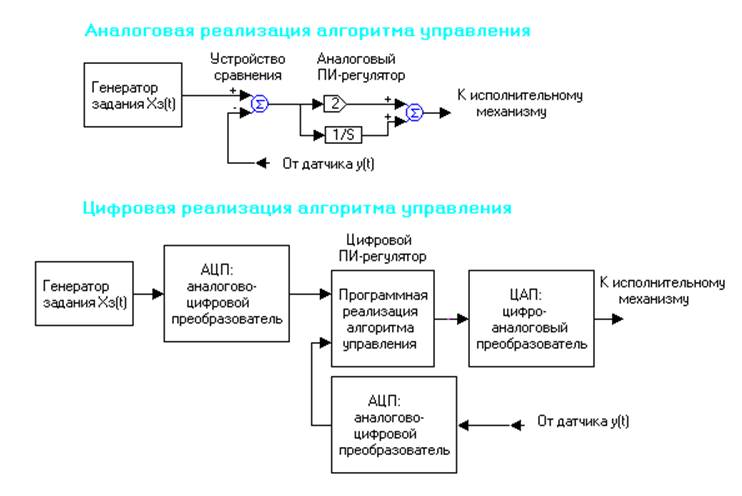
В аналоговой реализации используются физические устройства: сумматор, интегратор и усилитель, в цифровой - устройства преобразования ЦАП и АЦП и алгоритм, реализуемый в цифровом виде, т.е. в виде компьютерной программы.
Цифровой процессор выполняет те же функции, что и аналоговый ПИ-регулятор ,но сигнал выдает в виде последовательности чисел и отправляет результат на ЦАП.
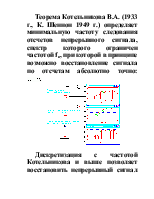
Для того чтобы направить в цифровой процессор последовательность чисел, соответствующих отсчетам непрерывного сигнала, его предварительно дискретизируют и квантуют.
Дискретизация - преобразование непрерывного сигнала в последовательность коротких импульсов, с амплитудой , равной значению сигнала в моменты стробирования, т.е. появления импульсов. Качество представления непрерывного сигнала амплитудным дискретным определяется частотой стробирования непрерывного сигнала: чем выше частота, тем выше качество, но и импульсы должны быть все короче.
Квантование - приближенная замена величины каждого импульса из последовательности, полученной в результате дискретизации непрерывного сигнала, целым числом шагов квантования, часто представляемом в двоичной форме. Качество представления непрерывного сигнала квантованным определяется шагом квантования. Чем он меньше, тем качество выше, но число разрядов числа становится больше.
В результате дискретизации и квантования получается временная последовательность двоичных чисел, которые и передаются в процессор компьютера, программно реализующий алгоритм управления. Квантование и дискретизацию осуществляет АЦП .
Этот процесс сопровождается ошибками, зависящими от частоты дискретизации и шага квантования
Для минимизации ошибок, обусловленных квантованием и дискретизацией, необходимо выбрать достаточно высокую частоту дискретизации и достаточно малый шаг квантования уровня. Но эти величины не должны быть чрезмерно большой и малым соответственно, иначе отсчеты будет трудно передавать по линиям связи и может даже не хватить быстродействия АЦП и мощности процессора для их обработки в реальном времени.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.