Линейная система управления – это такая система, реакция которой на сумму воздействий равна сумме реакций на каждое из них, а некоторому масштабному изменению воздействия соответствует пропорциональное изменение реакции. При малых воздействиях или их приращениях большинство систем может рассматриваться как линейные.
Математические модели объектов и систем автоматического управления строятся с целью их исследования и построения на его основе моделей оптимальных систем, отвечающих требованиям заказчика.
Дифференциальное уравнение – связывает воздействие на систему и ее реакцию на это воздействие. Дифференциальное уравнение это математическая модель системы или объекта управления.
В общем виде объекты и системы описываются нелинейным дифференциальным уравнением, связывающим воздействие u(t) на систему и его производные по времени с реакцией v(t) системы и ее производными:
(2.1)
Для его однозначного решения нужно задать начальные условия (НУ): v(0) = ...; v’(0) = ...;v’’(0) = ...;
Чаще всего при управлении нелинейными объектами приращение управляющих воздействий и их производных малы по сравнению со стационарными значениями, поэтому система может быть линеаризована, т.е. нелинейное дифференциальное уравнение может быть заменено линейным относительно этих приращений:
где приращения x, y – малы, для приращений начальные условия нулевые.
Коэффициенты ai и kj зависят от положения рабочей точки, в которой осуществлена линеаризация.
В уравнении известны коэффициенты, они определяются свойствами системы, воздействие x(t) – функция времени, ее начальные условия нулевые. Искомой величиной является функция времени y(t) – реакция, отклик системы на воздействие x(t).
Сигналы – это математические модели воздействий и реакций систем и объектов. Сигналы представляют собой функции времени и являются носителями информации.
Простейшие сигналы сравнительно легко генерируются и используются в качестве пробных при исследовании объектов и систем управления.
С помощью простейших сигналов можно представить произвольный (сложный сигнал).
Гармонический сигнал изменяется во времени по синусоидальному закону:
(2.3)
С помощью такого сигнала или набора (суммы) таких сигналов удобно моделировать периодические воздействия на системы, например вибрации, а также можно моделировать сигналы произвольного вида. Гармонический сигнал (2.3) характеризуется тремя параметрами (числами):
Используются также дополнительные параметры:
Рис. 2.1 - Графическое изображение гармонических сигналов.
Ступенчатая единичная функция моделирует подачу постоянного воздействия на объект и определяется следующим образом:
(2.5)
Ступенчатая функция используется в качестве пробного сигнала при оценке качества работы САР в переходном режиме. Произвольный сигнал может быть представлен бесконечной суммой ступенчатых функций.
Дельта – функция Дирака δ(t) это математическая модель короткого импульса:
(2.6)
Дельта - функция используется в качестве пробного сигнала при оценке качества работы САР в переходном режиме. Произвольный сигнал может быть представлен бесконечной суммой дельта - функций.
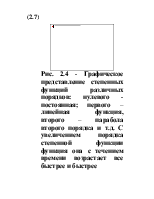
Степенная функция используется для представления произвольных гладких сигналов рядом Тейлора, т.е. в виде суммы парабол различных степеней, а также в качестве пробного сигнала при оценке качества работы САР в установившемся режиме. Аналитически степенная функция записывается в виде:
(2.7)
Рис. 2.4 - Графическое представление степенных функций различных порядков: нулевого - постоянная; первого – линейная функция, второго – парабола второго порядка и т.д. С увеличением порядка степенной функции функция она с течением времени возрастает все быстрее и быстрее
Математическое описание системы или объекта регулирования в ТАУ состоит в описании причинно-следственной связи между воздействием на систему и ее реакцией на это воздействие. Для этого используются четыре вида взаимосвязанных функций, любая
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.