9 Системы с переменной структурой
Во всех ранее рассмотренных линейных и нелинейных автоматических системах совокупность функциональных элементов, входящих в управляющее устройство, и характер связей между ними оставался раз и навсегда неизменным.
Однако такой способ управления не является единственным и наилучшим. Во многих случаях эффективность управления существенно повышается, если управляющее устройство обладает способностью разрывать или восстанавливать связи между входящими в него функциональными элементами и тем самым изменять структуру автоматической системы в целом.
Системы автоматического управления, в которых связи между функциональными элементами изменяются в зависимости от состояния системы, называются системами с переменной структурой (СПС). Рассмотрим такую систему на конкретном примере.
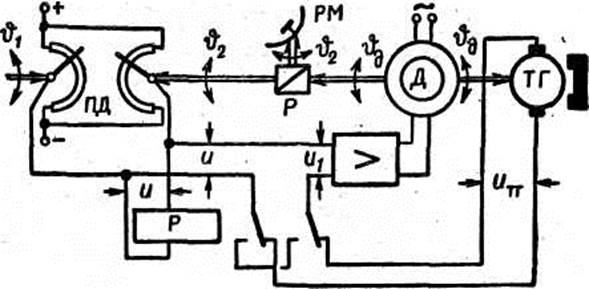
Рис.9.1 - Пример системы с переменной структурой
На рисунке 9.1 изображена схема следящей системы с переменным демпфированием, построенная по принципу СПС. Входящее в состав ее управляющего устройства реле Р в зависимости от величины напряжения и. на его обмотке может либо разрывать, либо восстанавливать связь между выходом тахогенератора ТГ и входом усилителя системы. Таким образом, следящая система может иметь две линейных структуры: с отключенным и с включенным тахогенератором.
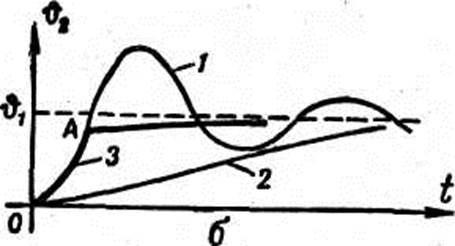
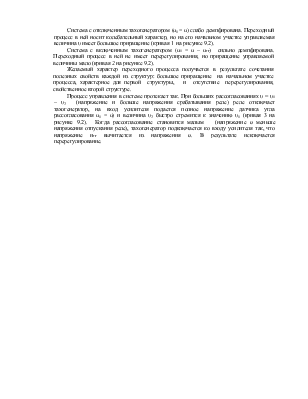
Рисунок 9.2 – Графики переходных процессов в СПС
Система с отключенным тахогенератором (u1 = u) слабо демпфирована. Переходный процесс в ней носит колебательный характер, но на его начальном участке управляемая величина υ имеет большое приращение (кривая 1 на рисунке 9.2).
Система с включенным тахогенератором (u1 = u – uтг) сильно демпфирована. Переходный процесс в ней не имеет перерегулирования, но приращение управляемой величины мало (кривая 2 на рисунке 9.2).
Желаемый характер переходного процесса получается в результате сочетания полезных свойств каждой из структур: большое приращение на начальном участке процесса, характерное для первой структуры, и отсутствие перерегулирования, свойственное второй структуре.
Процесс управления в системе протекает так. При больших рассогласованиях υ = υ1 – υ2 (напряжение и больше напряжения срабатывания реле) реле отключает тахогенератор, на вход усилителя подается полное напряжение датчика угла рассогласования u1 = u) и величина υ2 быстро стремится к значению υ1 (кривая 3 на рисунке 9.2). Когда рассогласование становится малым (напряжение и меньше напряжения отпускания реле), тахогенератор подключается ко входу усилителя так, что напряжение итг вычитается из напряжения и. В результате исключается перерегулирование.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.