






6 Качество управления
Ошибка системы
Любая автоматическая система должна быть не только устойчивой, но и достаточно точной в работе. В любой реальной системе невозможно точное равенство задающего воздействия g и управляемой величины y во всё время процесса управления. Возникает ошибка системы x=g-y. Её можно представить в виде X=Xп+Хуст., где Xп – переходная ошибка, а Хуст. – это ошибка системы по окончанию переходного процесса. Для определения Xп приходится либо находить корни характеристического уравнения, либо использовать критерии качества, не требующие нахождения ошибки Xп (частотный критерий качества, интегральный критерий качества).
6.2 Ошибки САУ в установившемся режиме
Рассмотрим неподвижное состояние, когда g=const ,или f=const. Имеются 2 вида систем: статические и
астатические. Статической системой автоматического управления называется
система, переходная функция которой в разомкнутом состоянии при размыкании по
ошибке имеет вид: 
В статических САУ интегрирующие звенья или отсутствуют. или охвачены обратной связью, т.е. нет множителя p в знаменателе.
 |
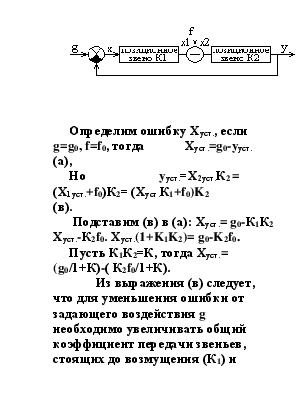
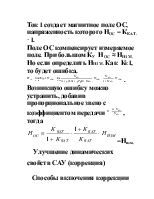
Определим ошибку Хуст., если g=g0, f=f0, тогда Хуст.=g0-yуст. (а),
Но yуст.=Х2уст.К2 = (Х1уст.+f0)К2= (Хуст.К1+f0)K2 (в).
Подставим (в) в (а): Хуст.= g0-К1К2 Хуст.-К2f0. Хуст.(1+K1K2)= g0-K2f0.
Пусть К1К2=К, тогда Хуст.= (g0/1+К)-( К2f0/1+К).
Из выражения (в) следует, что для уменьшения ошибки от задающего воздействия g необходимо увеличивать общий коэффициент передачи звеньев, стоящих до возмущения (К1) и уменьшать для стоящих после возмущения(K2). В статических САУ ошибку от задающего воздействия легко ликвидировать масштабированием. Этот метод рассмотрим позднее. Исследуем ошибку от возмущающего воздействия.
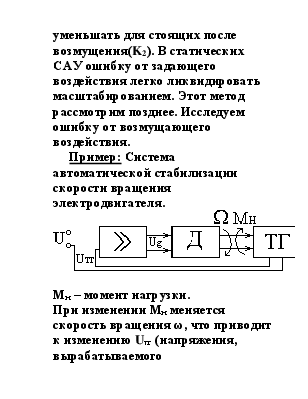
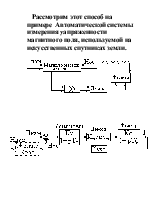
Пример: Система автоматической стабилизации скорости вращения электродвигателя.
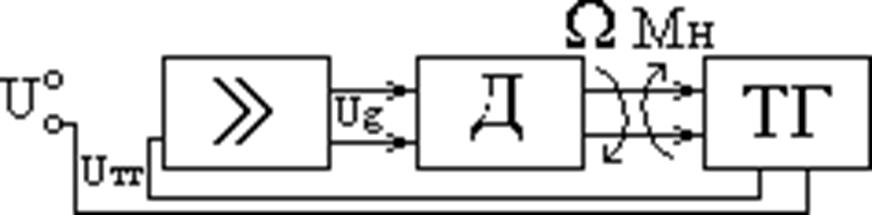
Мн – момент нагрузки.
При изменении Мн меняется скорость вращения ω, что приводит к изменению Uтг (напряжения, вырабатываемого тахогенератором). При правильном выборе знака обратной связи скорость вращения будет меняться значительно меньше, чем при отсутствии обратной связи. Покажем, что в системе будет установившаяся ошибка. При изменении момента нагрузки Мн изменится и момент двигателя, потому что в установившемся режиме Mдв = Мн. Mдв меняется при изменении ω или Uдвиг., но Uдвиг. (Uд) при постоянном U может измениться лишь при изменении Uтг, т.е. Uд = U- Uтг. Поэтому при изменении Мн обязательно меняется ω, т.е. появляется ошибка.
6.3 Оценка динамических свойств САУ по переходной характеристике
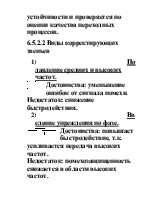
1) Качество оценивается по перерегулированию
σ %= (ym-yуст.)/ yуст.·100% .
σ %= |10-50|%.
 2) Быстродействие можно оценивать как время
переходного процесса от момента подачи скачка до момента tп, начиная с
которого для всех t ≥ tп: |y(t)- yуст. | ≤ Δyуст., Δyуст.=1-5%.
2) Быстродействие можно оценивать как время
переходного процесса от момента подачи скачка до момента tп, начиная с
которого для всех t ≥ tп: |y(t)- yуст. | ≤ Δyуст., Δyуст.=1-5%.
6.4 Корневые оценки динамических свойств САУ
О динамических свойствах САУ можно судить по расположению полюсов и нулей замкнутой системы управления.
 1-й вариант: имеется один вещественный полюс.
1-й вариант: имеется один вещественный полюс.
 ;
;  =>
=>  .
.
Чем меньше Т, тем быстрее растёт сигнал на выходе.
 При приближении полюса к мнимой оси
быстродействие уменьшается.
При приближении полюса к мнимой оси
быстродействие уменьшается.
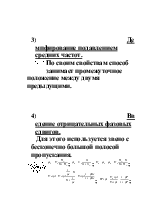
2-й вариант: два комплексно сопряжённых полюса.


 ;
;  .
.
Можно показать, что![]() . Перерегулирование зависит от
параметра
. Перерегулирование зависит от
параметра  -
этот параметр называется колебательностью. При равном удалении полюсов
от мнимой оси σ % больше в той системе, в которой полюсы дальше отстоят от
вещественной оси. Увеличение μ приводит к возрастанию перерегулирования, чтобы
колебательность системы не превышала заданной величины, полюса должны быть
расположены внутри области, в которой tgφ=μ.
-
этот параметр называется колебательностью. При равном удалении полюсов
от мнимой оси σ % больше в той системе, в которой полюсы дальше отстоят от
вещественной оси. Увеличение μ приводит к возрастанию перерегулирования, чтобы
колебательность системы не превышала заданной величины, полюса должны быть
расположены внутри области, в которой tgφ=μ.
 Если еще имеется и отрицательный нуль
(корень числителя) – это эквивалентно действию дифференцирующего звена и
колебательность возрастает с приближением нуля к мнимой оси. Добавление
вещественного полюса уменьшает перерегулирование и увеличивает время
переходного процесса. Если имеется несколько полюсов и нулей, но они достаточно
удалены от мнимой оси, то их влиянием можно пренебречь.
Если еще имеется и отрицательный нуль
(корень числителя) – это эквивалентно действию дифференцирующего звена и
колебательность возрастает с приближением нуля к мнимой оси. Добавление
вещественного полюса уменьшает перерегулирование и увеличивает время
переходного процесса. Если имеется несколько полюсов и нулей, но они достаточно
удалены от мнимой оси, то их влиянием можно пренебречь.
Улучшение качества правления
Общими методами уменьшения ошибки (повышения точности) САР являются:
1. Увеличение коэффициента усиления K разомкнутой цепи
2. Повышение порядка астатизма r
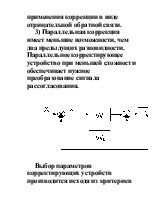
3. Применение регулирования по производным
4. Включение масштабирующих устройств на входе или выходе
Метод эффективен, широко применяется, но обычно увеличение K приводит к уменьшению запаса устойчивости
Астатическими называются системы, переходная функция которых в
разомкнутом виде имеет вид:  . Степень r
называется порядком астатизма.
. Степень r
называется порядком астатизма.
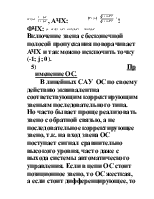
В астатической системе обязательно имеются интегрирующие звенья.
Кu/p– интегрирующее звено.

Рассмотрим установившееся состояние системы при g=g0, f1=f10, f2=f20. После окончания переходного процесса y=yуст. Это может быть только если Х2=0, иначе интегратор вырабатывал бы возрастающий сигнал Х3. Х2=К1Хуст.+ f10=0. Найдём отсюда Хуст.=- f10/ К1.
В выражение не входит f2 и К2. Ошибка астатической системы в режиме неподвижного состояния зависит лишь от возмущающего воздействия, приложенного до интегрирующего звена. Поэтому надо создавать системы в которых возмущение приложено после интегрирующего звена, тогда ошибка равна нулю.
 |
Статическую систему ,не имеющую интегрирующих звеньев, будем называть
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.